Download
1 / 34
340 likes | 478 Views
Modeling Dendritic Structures Using Path Planning. Ling Xu, David Mould. Importance of Dendrites. trees, lichens, coral, lightning, venation, river systems. Man-made dendrites. mazes networks. Existing Methods. Diffusion-Limited Aggregation. L-systems. Ontogenetic Modeling.

E N D
Modeling Dendritic StructuresUsing Path Planning Ling Xu, David Mould
Importance of Dendrites • trees, lichens, coral, lightning, venation, river systems
Man-made dendrites • mazes • networks
Existing Methods Diffusion-Limited Aggregation L-systems
Ontogenetic Modeling • Ontogenetic modeling: approach appearance of model without regard for underlying process • Seek lightweight means of mimicking appearance of dendritic objects • Path planning: • irregular curves • paths from root never cross
Overview • Implementation • Results • timing • model gallery • Augmentations • Future Work
Basic Idea • Geodesics in a weighted graph • Control: • weights in graph influence path shape • endpoint choice affects dendrite’s appearance • generator shape, likewise
Implementation • Dijkstra’s algorithm used to get costs from root to all other nodes in graph • O(N) to cover graph • O(n) for path from arbitrary endpoint to root • endpoints placed by hand or procedurally
Fractal Dendrites • Real objects often exhibit fractal (multiscale) detail • Explicitly introduce hierarchical detail: • Create low-frequency detail • Add structure at higher frequency • Repeat previous step
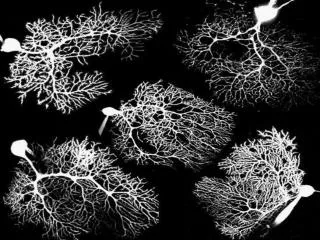
real DLA imitated DLA
Timing Comparison • Previously reported methods: minutes to hours, depending on complexity • Random walker DLA: 25k sites, 7.5 min • Our method: • simple 2D: about 1 second • simple 3D: about 3 seconds • fractal 2D: about 7.5 seconds
real DLA imitated DLA
“Rocks” • Multi-source path planning partitions space – can be used to produce irregular 3D objects
Model Creation • Extrusion around path • Isosurface within 3D graph • distance values known • choose isovalue, use isosurface extraction to get mesh (marching cubes)
Limitations • Resolution bound to fixed resolution of graph • in 3D, adding diagonal edges costly (26-connected vs. 6-connected) • Solution? • path smoothing • multiresolution graph
Future Directions • Procedural endpoint placement • Additional phenomena • Path smoothing • Path extrusion
Acknowledgements • Thanks to Jeremy Long for fruitful discussions regarding path planned models • This work was supported by NSERC RGPIN 299070-04 and by the University of Saskatchewan