Download
1 / 17
180 likes | 433 Views
Complex eigenvalues. SECTION 3.4 Directions: do the calculations necessary to get from one slide to the next. Just playing around. Try this sometime (if you don’t have a computer, skip this step for now and wait to share with someone).

E N D
Complex eigenvalues SECTION 3.4 Directions: do the calculations necessary to get from one slide to the next.
Just playing around Try this sometime (if you don’t have a computer, skip this step for now and wait to share with someone). • Start the Differential Equations software and go to LinearPhasePortaits. • Click on the Eigenvalues button. • Experiment with changing the values of a, b, c, and d until you find linear systems with complex eigenvalues. • Click on the direction field to plot some solutions. • How would you characterize these solutions?
Complex eigenvalues Consider the system Find the eigenvalues: So the eigenvalues are Now let’s look at the eigenvectors… __________
Complex eigenvectors Bear with me… Let’s see if we can find V so that (A - I)V = 0. This will be the eigenvector for . First, try = i. Find the eigenvector. The equation tells us that x0 = 1, y0 = i is an eigenvector.
Continuing… Suppose we just keep going without worrying about the fact that the eigenvalues and eigenvectors are complex numbers. Then one solution to the original system is How the ^*(%^ can we interpret that?
Another way to solve the system Let’s take a little detour, because we actually know the solution to the system which represents the undamped harmonic oscillator with spring constant k = 1. Name two solutions of the system that are not multiples of each other, and write down the general solution. The general solution is x(t) = k1cos t + k2sin t and y(t) = -k1sin t + k2cos t, or
You can prove Euler’s Formula using the Maclaurin series for exp, sin, and cos. See p. 746. Euler’s Formula These solutions must be related. Why does eitgive you trig functions? Euler’s Formula converts complex exponentials into trig functions: ________________ (apply Euler’s Formula)
Euler’s Formula These solutions must be related. Why does eitgive you trig functions? Euler’s Formula converts complex exponentials into trig functions: (factor out the i term and write as a linear combo of two 2x1 matrices) __________________
Euler’s Formula These solutions must be related. Why does eitgive you trig functions? Euler’s Formula converts complex exponentials into trig functions: Notice anything??? Compare to the slide “Another way to solve the system.”
A detour into complex-land In general a complex number is a number a + bi, where a and b are real numbers. • a is called the real part of a + bi • b is called the imaginary part of a + bi. For example, the real part of 3 - 2i is 3 and the imaginary part is -2. Likewise, if t is a real parameter, the real part of the function f(x) = t2 - i sin 2t is t2, and the imaginary part is sin 2t. Notice that both the real and imaginary parts are real numbers or real-valued functions.
Exercises In what follows, the subscripts “re” and “im” refer to the real and imaginary parts of the expression. • If y = 4(i + 6), then yre = ____ and yim = _____ • If y = (-i + 2)2, then yre = ____ and yim = _____ • If then Vre = ____ and Vim = _____ • If y(t) = eit, then yre(t)= ____ and yim(t) = _____ • If y(t) = e4it, then yre(t)= ____ and yim(t) = _____ • If y(t) = e(2-3i)t, then yre(t)= ____ and yim(t) = _____ • If y(t) = ei, then yre(t)= ____ and yim(t) = _____
Answers • If y = 4(i + 6), then yre = 24 and yim = 4 • If y = (-i + 2)2, then yre = 3 and yim = -4 • If then and • If y(t) = eit, then yre(t) = cos t and yim(t) = sin t • If y(t) = e-4it, then yre(t) = cos 4t and yim(t) = -sin 4t • If y(t) = e(2-3i)t, yre(t)= e2tcos 3t and yim(t)= -e2t sin 3t • If y(t) = ei, then yre = cos = -1 and yim = sin = 0 Notice that ei = cos + i sin = -1 + 0 = -1. Huh?
A little gift Suppose we have only one solution Y(t)---but it’s a complex solution! We’re in luck! The theorem on the bottom of page 294 says that if you have a complex solution Y(t), you can break it up into two parts: the real part Yre(t) and the imaginary part Yim(t). It turns out that both Yre(t) and Yim(t) are solutions of the original system of DEs. So IF they’re linearly independent, the general solution is The “little gift” is the fact that you only need to find one complex solution, not two, then break it up into real and imaginary parts.
Exercises • p. 304-5: 1, 2
Qualitative analysis If a system has two real eigenvalues, we can classify the origin as a sink, source, or node just by knowing the sign of the eigenvalues. Is there anything similar we can do for complex eigenvalues? Yes. Here’s an example. Suppose = 2 + 3i is an eigenvalue and Y0 is one of its eigenvectors. Then a solution is Since Y0is a constant vector, and the sin 3t and cos 3t functions just oscillate with period 2/3, all solutions tend away from the origin as t∞ (because of the e2t term). Therefore, the origin is a spiral source. See p. 299 for a generalization of this example.
Exercises • p. 305: 3, 4, 5, 9, 13, 15
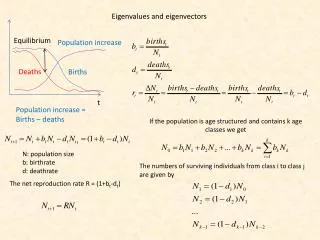
Discussion The motion of a damped harmonic oscillator is a solution to a DE of the type where m > 0 and b and k are nonnegative constants. The second term represents a force that is proportional to velocity (it could be something like friction). If b > 0, then the system is damped. • Suppose m = 2 and k = 3. Find the eigenvalue(s). • Use qualitative analysis to explain how the behavior of the solutions depends on the value of b.