Download
1 / 8
80 likes | 245 Views
tétranyques Photo : Inra (Brun). pucerons Photo : Inra (Brun). thrips Photo : Inra (Brun). Objectif : dans le cadre de la Protection Biologique Intégrée, aider aux prises de décision précoces; approche in situ ( non invasive) pour réduire l’utilisation de pesticides. BioSerre.

E N D
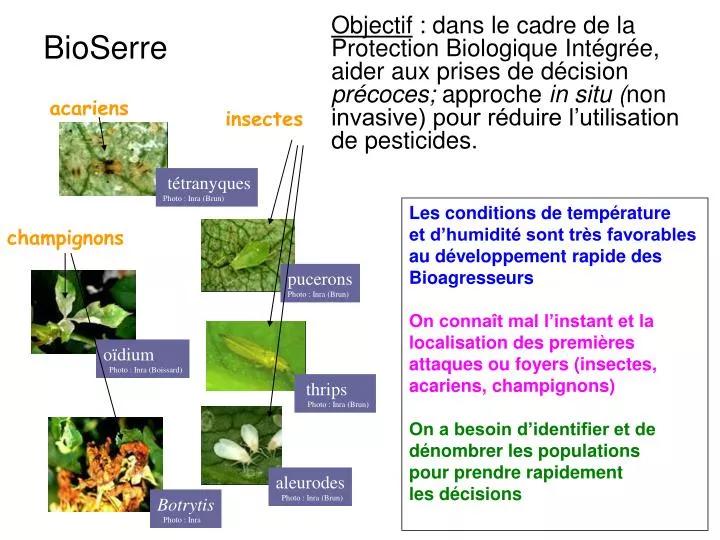
tétranyques Photo : Inra (Brun) pucerons Photo : Inra (Brun) thrips Photo : Inra (Brun) Objectif : dans le cadre de la Protection Biologique Intégrée, aider aux prises de décision précoces; approche in situ (non invasive) pour réduire l’utilisation de pesticides. BioSerre acariens insectes Les conditions de température et d’humidité sont très favorables au développement rapide des Bioagresseurs On connaît mal l’instant et la localisation des premières attaques ou foyers (insectes, acariens, champignons) On a besoin d’identifier et de dénombrer les populations pour prendre rapidement les décisions champignons oïdium Photo : Inra (Boissard) aleurodes Photo : Inra (Brun) Botrytis Photo : Inra
BIOSERRE : Réseau de capteurs in situ pour la détection précoce des BIOagresseurs dans les cultures sous SERRE Proposition: Système de vidéo surveillance temps réel des plantes (acquisition, détection et tracking) • Algorithmes de vision adaptatifs • Utilisation de connaissance a priori • Techniques d’apprentissage Une camera observant un piège à insectes dans la serre
Collaborations passées • Action INRIA COLOR Horticol 2001 (INRA/URIH P. Boissard) • Production respectueuse de l’environnement (rosier/oïdium) • DEA Vincent Leclerc • Thèses de Céline Hudelot, Nicolas Maillot (soutenues en 2005) • Approche cognitive pour la détection des parasites du rosier, utilisation d’ontologies pour l’apprentissage et la reconnaissance d’objets • Thèse Vincent Martin (2007)
Thèse V. Martin • But : détecter un parasite (Aleurode) à deux stades de développement : • Aleurodes adultes • Oeufs d’Aleurodes • Support : • Numérisation (scanner à plat) depuis le support naturel (feuilles prélevées sur des rosiers de culture en serre) • Approche • Vision cognitive (apprentissage, adaptation au contenu, connaissance a priori…)
Thèse V. Martin Résultats expérimentaux • Échantillon représentatif de 200 images (=1 serre de 200 m2) d’une résolution de 1200 dpi • Temps de traitement : ~45 sec / image (2495x4056 pixels)
Prototype BIOSERRE • Première expérience en cours • 5 caméras Wifi installées sous serre au CREAT (130 m2) • surveillance de pièges répartis dans la serre • 3 variétés de roses observées, pendant la journée • utilisation de techniques existantes dans Pulsar Acquisition : Zoom Détection: régions d’intérêt en blanc Classification : régions labellisées
Futur • Augmenter nombre de caméras, • Plus de types d’insectes détectés & extension aux champignons/maladies • Observation directe sur organes (feuilles tiges) • Reconnaissance de comportements (ponte, prédation…) • Utiliser des algorithmes de Vista • Système générique, flexible, adaptable…
Brainstorming • Quelle connaissance experte utiliser ? (base de données …) • Objectif final (atteignable en 2 ans ….) ? • Cartes d’échantillonnage ? • « Preuve » de détection précoce ? • Détection de quels comportements (intéressants) ? • Avancées pour les biologistes ? • Validation vision cognitive ? • Fouille de données ?