Download
1 / 17
490 likes | 1.92k Views
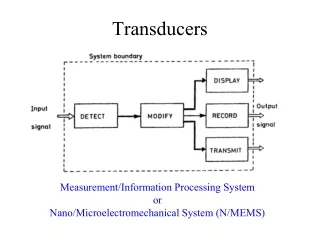
Seismic Transducers. A seismic transducer consists of two basic components: Spring – Mass – Damper Element Displacement Transducer. (Note: x o = x i – x M ). (MS Fig 4.77). Seismic Transducers – Acceleration Sensor.

E N D
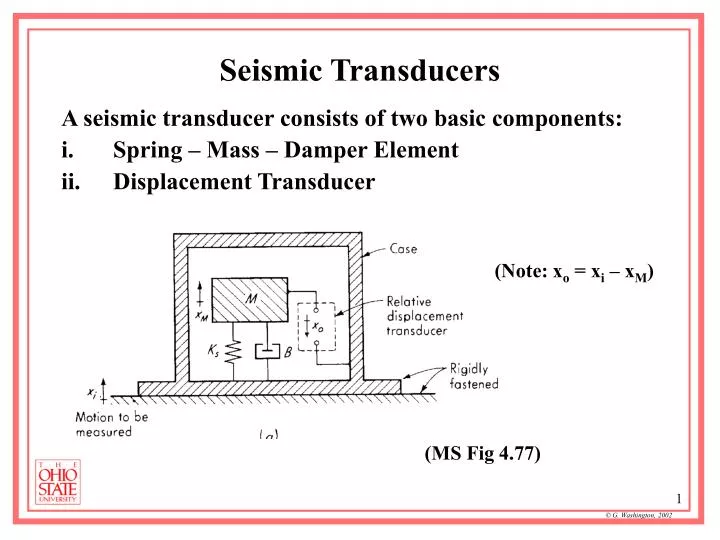
Seismic Transducers A seismic transducer consists of two basic components: • Spring – Mass – Damper Element • Displacement Transducer (Note: xo = xi – xM) (MS Fig 4.77)
Seismic Transducers – Acceleration Sensor Let’s explore the dynamic response of the spring-mass-damper element alone. Noting the sign conventions in Fig. 4.77, we have, from Newton’s second law for the motion of mass M, xM: (Where xM = xi – xo) (A classic 2nd Order System) We define (again) With the result
Seismic Transducer – Acceleration (cont). Let’s associate the following: Input is object acceleration Output is relative displacement of M and object Static Sensitivity (sec2) Classic 2nd Order System
Seismic Accelerometer – Freq Response (cont) • Question: • Over what range of frequencies can we actually use a seismic accelerometer? • Answer: • To be most useful we desire a “flat” frequency response and a “linear” phase shift. In other words, we need • SIG << n • ~ 0.4 – 0.6 • But recall that
Seismic Accelerator – “Readout” The previous discussion ignored the response of the displacement sensor used to measure xo!! We need to consider this! RECALL qi,1 qo,1 qi,2 qo,2 System 1 System 2
Seismic Accelerometer i. Resistive Potentiometer Readout
Seismic Accelerometer ii. Piezo Readout “Usable” range depends upon damping
Seismic Displacement How about a seismic displacement transducer? (We’ll let you do this one as homework).
Capacitance Transducers Consider a basic parallel plate capacitor, with C = Capacitance (pF) A = Plate Area (in2) x = Plate Separation (in) If either x or A are changed, then C will change!!
Basic Capacitance Transducer Geometries Linear Motion Rotational Motion Typical Capacitance Values
Capacitance Transducers – Signal Conversion Capacitance is not easy to measure directly. We need to convert “signal” to current or voltage. a. AC Voltage Approach We apply a constant amplitude AC voltage, Vex, at = ex This will result in a variable amplitude AC current at ex Let’s Work This Out! Note: This approach is most useful for transducers in which xi modifiers A (the plate Area) Why??
Capacitance Transducers – Signal Conversion b. AC Current Approach We apply a constant amplitude AC current, iex, at = ex This will result in a variable amplitude AC Voltage at ex, eo Let’s Work This Out! Note: This approach is most useful for transducers in which xi modifiers the gap (x). Why??
Signal Conversion – AM Modulation Of course in either of the last two cases, the actual signal is AM modulated (Carrier Frequency = ex MS Fig 4-37c
Signal Recovery – Current Measurement A good approach to convert current to voltage is to use an Operational Amplifier as shown below iai ~ 0 if + ix = 0
Op Amp Current – Voltage Conversion (Output voltage 1/Cx)
One Final Note This configuration is best for transducers in which gap is varied. (because Cx 1/x so that eo varies linearly with xi) Alternatively, we can exchange the positions of Cf and Cx, giving Best for transducers in which Area is varied. (because Cx A so that eo again varies linearly with xi)