Download
1 / 27
280 likes | 490 Views
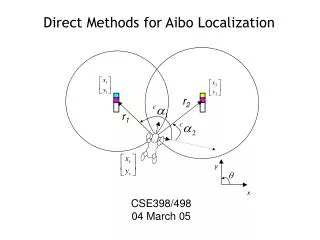
AIBO VISION. by Utku Tatlıdede Kemal Kaplan. AIBO ROBOT. Specifications: ERS-210 CPU clock speed of 192MHZ 20 degrees of freedom Temperature,Infrared Distance, Acceleration, Pressure, Vibration Sensors CMOS Image Sensor Miniature Microphones, Miniature Speaker, LCD Display.

E N D
AIBO VISION by Utku Tatlıdede Kemal Kaplan
AIBO ROBOT • Specifications: • ERS-210 • CPU clock speed of 192MHZ • 20 degrees of freedom • Temperature,Infrared Distance, Acceleration, Pressure, Vibration Sensors • CMOS Image Sensor • Miniature Microphones, Miniature Speaker, LCD Display • Dimensions and Weight: • Size (WxHxL) 6.06" (W) x 10.47" (H) x 10.79" (L) • Weight 3.3 lbs. (1.5kg)
AIBO VISION • CCD camera • 16.8 million colors (24 bit) • 176x144 pixel image • Field of view 57.6° wide and 47.8° tall • Up to 25 fps • Stores information in the YUV color space
PROCESSING OUTLINE • Color Segmentation -Representations -Algorithms • Region Building and Merging - Region Growing - Edge detection • Object Recognition-Classification -Template matching - Sanity check • Bounding Box Creation
COLOR REPRESENTATION • Color can be physically described as a spectrum which is the intensity of light at each wavelength. • Radiance: Energy (W) from light source • Luminance: Energy perceived by observer • Brightness: Subjective descriptor • CIE-XYZ • RGB • CMY, CMYK • HSV, HSI, HLS • YIQ • YUV, YCbCr • LUT
RGB (Red, Green, Blue) • Additive color space • Threeprimaries: red, green, and blue • Cannot always produce a color equivalent to any wavelength
HSI (Hue, Saturation, Intensity) • Similar to HSV (Hue, Saturation, Value) • Represents colors similarly how the human eye senses colors.
YUV (Luminance, Chrominance) • Similar to YIQ and YCbCr • Used for the PAL and SECAM broadcast television system • Amount of information needed to define a color is greatly reduced
CONVERSIONS H = cos-1([(R-B)+(R-G)]/2*[(R-G)2+(R-B)(G-B)]1/2) S = 1 – 3[min(R,G,B)]/(R+G+B) V = (R+G+B)/3 RGB TO YUV Y = .299R + .587G + .114BU = -.147R - .289G + .437BV = .615R - .515G - .100B RGB TO HSV • Can we reduce the color space by using unsupervised dimension reduction techniques (like PCA)? • Can we use different domains?
AIM OF COLOR SEGMENTATION • For each object, find the most accurate subspaces of the color space to represent the object. • YUV seems the most promising color representation for our real time applicaiton.
FINDING THE SUBSPACES First label images, then use supervised pattern recognition techniques. Most common ones: • C4.5 • MLP • KNN
C4.5 • Forms a decision tree for classification. • Uses the concept of information gain (effective decrease in entropy).
MLP (Multi-Layer Perceptron) • The MLP networkis suited to a wide range of applications such as pattern classification and recognition, interpolation, prediction and forecasting.
KNN (K-Nearest Neighbor) • KNN is a simple algorithm that stores all available examples and classifies new instances of the example language based on a similarity measure.
CONDENSED KNN • Condensed KNN: We can reduce the training set by removing the samples that introduce no extra information to the system.
PCA (Principal Component Analysis) • PCA is a mathematical procedure that converts a number of possibly correlated variables into a hopefully smaller number of uncorrelated variables called principal components.
RLE (Run Length Encoding) • RLEencodes multiple appearances of the same value.
REGION GROWING • This method depends on the satisfactory selection of a number of seed pixels. • This method may be performed before color segmentation.
REGION MERGING AND SPLITTING • Merging algorithms: in which neighboring regions are compared and merged if they are similar enough in some features. • Splitting Algorithms: in which large non-uniform regions are broken up into smaller regions which is hopefully uniform.
OBJECT RECOGNITION OPPONENT GOAL BEACON BALL
CLASSIFICATION • Already done by color segmentation. • Ball: The biggest blob with “ball color”, • Beacons: Two adjecentblobs with beacon colors, etc. • Unclassified blobs are discarded. • Each object is classified with a certainty.
TEMPLATE MATCHING • Accomplished by using convolution or correlation. • Only works for translation of the template. • In case of rotation or size changes, it is ineffective. • Also fails for partial views of objects.
SANITY CHECK • A series of sanity check inspections are performed by the AIBO vision module to ensure the object classification is logically correct. • Ball cannot be above the goal, • Goals cannot be below the field, • There cannot be two balls, etc.
BOUNDING BOX CREATION • Requires affine transformations (translation, rotation, scaling) • Required for calculating distance and position information • The final products of the vision module are the bounding boxes of each visible object.
REFERENCES • Cerberus RoboCup 2002 Team Report • rUNSWift RoboCup 2002 Team Report • NUBots RoboCup 2002 Team Report • CMPack RoboCup 2002 Team Report • MACHINE LEARNING, Mitchell • MACHINE VISION, Jain, Kasturi, Schunk
REFERENCES Any Question?