Download
1 / 53
540 likes | 696 Views
Scheduling Manufacturing Systems with Agents: A Game Theory Based Negotiation Approach. By Astrid Babayan Department of Mathematics and Engineering Harold Washington College January 2005. What is IE?.

E N D
Scheduling Manufacturing Systems with Agents: A Game Theory Based Negotiation Approach By Astrid Babayan Department of Mathematics and Engineering Harold Washington College January 2005
What is IE? • Industrial Engineering started early in the twentieth century with the applications of the scientific methods in factories. Because of its initial factory orientation, this engineering discipline became known as industrial production or management engineering. Industrial Engineering is frequently defined as the integration of systems of machines, people, materials, money, and methods. While these key components still play an extremely important role in I.E., the meanings of these terms have became far more general in scope. A common misconception is that all I.E.'s work in factories. Information, energy and computers have become equally important components, causing the applications of I.E. to expand beyond factories to hospitals and other health-care operations, transportation, consulting companies, food processing companies, computer/computer software companies, organizations, media operations, service companies, such as banking and utilities, and divisions of local, regional, and national governments. I.E.'s are often suited to hold positions traditionally held by Business Administration and Mechanical Engineering majors. Harold Washington College - Math Colloquium 2005
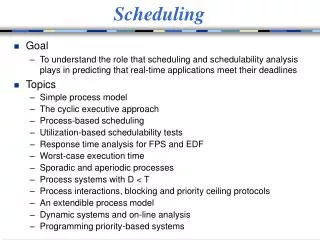
Research Objectives • Develop multi-agent based large scale scheduling problem solving framework with incorporated cooperation mechanism ruled by the game theoretic regulations. • Develop objective measures of effectiveness for evaluating the developed model. • Verified and validated the effectiveness of the developed methodology by comparing the results with those provided by other researchers. Harold Washington College - Math Colloquium 2005
Scheduling Problem Given: • a set ofactivities that must be executed; • a set ofresources with which to perform the activities; • a set ofconstraints which must be satisfied; and • a set ofobjectives with which to judge a schedule’s performance. Find: • The best way to assign the resources to the activities at specific times such that all of the constraints are satisfied and the best objective measures are produced. Harold Washington College - Math Colloquium 2005
Scaling Issues - The Size of the Problem Using the nomenclature of Van Dyke Parunak, scheduling problems consist of asking what must be done where and when. • Tasks (what) to complete. • Resources (where) operate on. • Specific periods of time (when). Harold Washington College - Math Colloquium 2005
Production progress in assembly Sub - Sub - Sub - assembly assembly assembly Sub - Sub - assembly assembly Product complexity Parts production Product Sub - assembly Assembly Subdivision Representation of a Product Harold Washington College - Math Colloquium 2005
P 1 A 1 P 2 A 2 P 3 P 1 P 3 P 2 Classification of Scheduling Problems Simple Digraph (Gs): one assembly operation at each assembly level Harold Washington College - Math Colloquium 2005
P 1 P 3 P 5 P 2 P 4 Classification of Scheduling Problems Complex Digraph (Gc): more than one assembly operation at least in one assembly level P 1 A 1 P 2 A 3 P 3 A 2 P 4 P 5 Harold Washington College - Math Colloquium 2005
Classification of Scheduling Problems N-product scheduling problem: N multiple products are produced in the system. In solving the N-product scheduling problem, the assembly sequence of a product could be either a simple digraph or a complex digraph. . . . Product N Product 1 Harold Washington College - Math Colloquium 2005
Product 1 . . . . . . Ad t(Ad)=0 Product N N-Product Scheduling Gc Scheduling Construct a complex digraph by connecting the assembly nodes of N products to a dummy final assembly node, Ad. Let t(Ad)=0. Harold Washington College - Math Colloquium 2005
General Structure of {m, q} Manufacturing System Harold Washington College - Math Colloquium 2005
Constraints Precedence relations among the activities represented by the digraph should not be violated. Harold Washington College - Math Colloquium 2005
Scheduling Problem Formulation Given the manufacturing system structure and product assembly structure representation by a digraph assign parts and subassemblies/assemblies to the machines at the machining and assembly stages and determine the processing sequences on the machines so that the makespan), i.e., the maximum completion time Cmax, is minimized. Harold Washington College - Math Colloquium 2005
Exact Solution Methods Mathematical Programming Linear Programming Integer Programming Dynamic Programming Bounded Enumeration (modifications of BB) Heuristic Solution Methods Dispatching Rules Artificial Intelligence Techniques Simulated Annealing Neural Networks Genetic Algorithm Fuzzy Logic Hybrid Methods Solution Approaches Developed for Solving the Scheduling Problems Harold Washington College - Math Colloquium 2005
Machining-Driven Product Differentiation Strategy Assembly-Driven Product Differentiation Strategy Problem Instances Solved Harold Washington College - Math Colloquium 2005
NP-Completeness Results • System structure {m=2, q=1} • Jobs: Lee et al. (1993) showed that 3MAF scheduling with makespan minimization is NP-complete by reducing it to 3-PARTITION problem. Our problem was reduced to 3MAF by constructing an instance for any {m, q} system where either m > 1 or q > 1. Hence our problem is NP-complete too. Harold Washington College - Math Colloquium 2005
Why Agent-Based Approach? • can simplify problem solving by splitting the problem into simple tasks; • can tolerate uncertain data and knowledge; • offer conceptual clarity and simplicity of design; • allow incremental modification of the system boundary; and • suit well to distributed problems. Harold Washington College - Math Colloquium 2005
Designing Agent-Based Systems Basic strategy:Decompose & Distribute Reduces complexity of a task less capable agents, and fewer resources needed. Decomposition can be done: • Physically: based on the layout of the info sources or decision points. • Functionally: according to the expertise of available agents. Distribution can be done according to: • Avoid overloading critical resources. • Assign tasks to agents with matching capabilities. • Assign resources to agents with matching capabilities. Harold Washington College - Math Colloquium 2005
Properties of Agents Used in the System • autonomy: agents operate without the direct intervention of human operators, and have high degree of computational capabilities; • sociability: agents interact with other agents via some kind of agent communication language; • reactivity: agents perceive their acting environment, and respond to the changes that occur there; • pro-activity: agents do not simply act in response to the environment, they are able to exhibit goal oriented behavior by taking initiatives; • veracity: agent will not knowingly communicate false information; • benevolence: agents do not have conflicting goals, and every agent will therefore try to do what is asked of it; and • rationality: agent will act in order to achieve its goals, and will not in such a way as to prevent its goals being achieved. Harold Washington College - Math Colloquium 2005
Agent-Based Scheduling Framework Harold Washington College - Math Colloquium 2005
Digraph Decomposition Harold Washington College - Math Colloquium 2005
Agent 4 Job 4 P1 A1 P2 Agent 2 Job 2 Agent 5 Job 5 A3 P3 A2 P4 Agent 1 Job 1 P5 A5 P6 Agent 3 Job 3 A4 P7 Scheduling Problem Decomposition SAJ0={J3, J4, J5}. NSJ0={J1, J2} SJ0={} Harold Washington College - Math Colloquium 2005
Definitions and Notations Define: J = (J1, J2, J3, …, Jn) the set of the jobs to be scheduled; SAJ = set of schedulable jobs. NSJ = set of non-schedulable jobs. SJ = set of scheduled jobs. Let stage be a step in the scheduling process, when a change in the set of schedulable/scheduled jobs occurs. The sets SAJ, NSJ, SJ will be defined for stage t as: SAJt, NSJt, SJt Harold Washington College - Math Colloquium 2005
Definitions and Notations (cont.) At any point of a time the followings hold: Harold Washington College - Math Colloquium 2005
migration Inner game Outer game Set of Set of candidate feasible scheduled jobs jobs migration relevant info Set of relevant info infeasible jobs sharing sharing Schedule Manager Agents Interaction in the Scheduling Process Harold Washington College - Math Colloquium 2005
What Is a Game? “A game is a description of strategic interaction that includes the constraints on the actions that the players can take and the players’ interests, but does not specify the actions that the players do take.” - Osborne and Rubenstein Harold Washington College - Math Colloquium 2005
What Is Game Theory? “Game theory is a bag of analytical tools designed to help us understand the phenomena that we observe when decision-makers interact.” – Osborne and Rubenstein Harold Washington College - Math Colloquium 2005
Elements of Game Theory • Players with similar or different interests. • Actions available to each player. • Consequences related to players’ choices. Examples: • Chess, go, tic-tac-toe, poker, spades. • Presidential elections, wars, political negotiations • Airline fare setting, business decisions • Channel allocation, bandwidth allocation, other engineering problems Harold Washington College - Math Colloquium 2005
Two Major Branches of Game Theory • Non-cooperative game theory includes a detailed study of the strategies available to the players. • Cooperative game theory is concerned with those situations in which players can negotiate about what to do in the game. Harold Washington College - Math Colloquium 2005
Cooperative Game Theory • Players are going to play a game (in the future). • Before the game, the players are able to negotiate and sign a binding contract regarding which strategies they will play. • The result of their negotiations is the subject of cooperative game theory. Harold Washington College - Math Colloquium 2005
Two Classes of Cooperative Games • N person transferable utility games: N-TU • N person non-transferable utility games: N-NTU Depending weather or not players have comparable units of utility. applied to problem Harold Washington College - Math Colloquium 2005
How a N-TU Game is Defined? • Set of Players/Agents: N={1, 2, …n} • Characteristic Function: Payoff v(S) for each coalition SN of the players’ set N Harold Washington College - Math Colloquium 2005
Solution Concepts in Cooperative Game Theory • Core • Shapley Value Efficiency: Symmetry: Dummy: Additivity: Harold Washington College - Math Colloquium 2005
Solution Concepts in Cooperative Game Theory (cont.) • Banzhaf-Coleman Power Index Average of player i’s marginal contribution Nucleolus Harold Washington College - Math Colloquium 2005
Shapley Value General formula for calculating Shapley value: For our problem reduces to: Percentage contribution: Harold Washington College - Math Colloquium 2005
Defining Outer Game Initialization t=0 SAJt, NSJt, and SJt. t=t+1 SAJt, NSJt, and SJt. Agent in SAJ make their individual schedules: Cmax,i yes End of outer game SAJ= k=index(max i SAJ {Cmax,i}) no agent k enters inner game k=index(max i SAJ ShVi/Cmax) Harold Washington College - Math Colloquium 2005
Defining Inner game Coalition: SN Payoff: v(S) Agent k reschedules job k i S Calculate v((S-{i} )i*) i* is a new strategy by i Terminate rescheduling no yes k=index(max i S ShVi/Cmax) Inner game is stabilized Harold Washington College - Math Colloquium 2005
Lower Bound on Makespan LB = solution obtained from MIP relaxation of the original problem Since the optimization is MIN problem, the following holds: Harold Washington College - Math Colloquium 2005
Agent-Based Scheduling - Coding Agent Class properties: • Knowledge of the system structure • Knowledge of his/her own job/task structure • Knowledge of system state • Completion time on each assembly/fabrication machine • Knowledge of the state of sets SAJ, NSJ, SJ • Knowledge of his/her preceding agents completion time • Knowledge of formulating and solving MIP formulations • Solver DLL by Frontline Systems Harold Washington College - Math Colloquium 2005
Agent 3 Job 3 Agent 1 Job 1 Agent 2 Job 2 P1 A1 P2 A2 P3 A4 P4 A3 P5 P6 Example : Agent-Based Scheduling Assembly structure and machining and assembly times of a product. Set of jobs is defined: J = {J1, J2, J3} Harold Washington College - Math Colloquium 2005
t=0 SAJ0={J2, J3} NSJ0={J1=J2&J3} SJ0={} a3 is the winner t=1 SAJ1={J3} NSJ1={J1=J2&J3} SJ1={J2} v(3)=12, v(S)=11, v(S+3)=19 ShV(3)=(v(S+3)-v(S)+v(3)) /2=10 Percentage contribution=10/19=0.555 Example : Agent-Based Scheduling (Cont.) Harold Washington College - Math Colloquium 2005
Test Problem Generation – {1, 1} System (i) MT ~ U(7, 25) ; AT ~ U(10, 30) (ii) MT ~ U(6, 14) ; AT ~ U(6, 19) (iii) MT ~ U(3, 12) ; AT ~ U(4, 12). (iv) MT ~ U(5, 16) ; AT ~ U(6, 20) The average size of the problems corresponds to 37 part nodes, 26 assembly nodes, and 7 assembly levels. The data was generated based on the real assembly application information from industrial assembly handbooks (e.g., Nof et al., 1996; Boothroyd, 1992; Lotter, 1989). Harold Washington College - Math Colloquium 2005
Analysis of Results – {1, 1} Average over 10 instances of each problem type. Harold Washington College - Math Colloquium 2005
Test Problem Generation – {m, q} System (i) MT ~ U(3, 12) ; AT ~ U(4, 5) (ii) MT ~ U(4, 9) ; AT ~ U(6, 11) (iii) MT ~ U(2, 14) ; AT ~ U(7, 18) The average size of the problems corresponds to 45 part nodes, 30 assembly nodes, and 5 assembly levels. {m, q}={3, 3}; {7, 7}; {20, 20}. Harold Washington College - Math Colloquium 2005
Analysis of Results – {m, q} Average over 10 instances of each problem type. Harold Washington College - Math Colloquium 2005
N-Job 3-Machine Flexible Flowshop Scheduling • System Structure Harold Washington College - Math Colloquium 2005
N-Job 3-Machine Flexible Flowshop Scheduling • Task Structure Harold Washington College - Math Colloquium 2005
Test Problem Generation - Comparison (i)balanced load: Pj,1, Pj,2, Pj,3 ~ U(1, 100) (ii) light load on stage 1: Pj,1~U(1, 20), Pj,2, Pj,3 ~ U(1, 100) (iii) light load on stage 2: Pj,1, Pj,3 ~ U(1, 100), Pj,2~U(1, 20) Harold Washington College - Math Colloquium 2005
Comparison of Results Harold Washington College - Math Colloquium 2005
Definitions and Notations Harold Washington College - Math Colloquium 2005