Download
1 / 71
770 likes | 1.12k Views
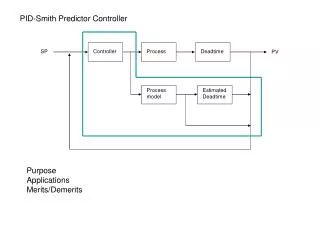
PID controller Algorithms. Basic control algorithm. Control action to make correction to the error. Reference input to maintain at a desired steady state. This algorithm is known as a proportional control law . It is used to compensate for disturbances or changes which occur only

E N D
Basic control algorithm Control action to make correction to the error Reference input to maintain at a desired steady state
This algorithm is known as a proportional control law. It is used to compensate for disturbances or changes which occur only in a short time period and eventually will disappear.
When transient disturbance occurs Load GL(s) mr Disturbance d + + Gp m y Kc ( yd – y )
When disturbance disappears and system backs to normal Load = 0 GL(s) mr d = 0 + + Gp m = mr y = yd Kc ( yd – y ) = 0
When constant disturbance occurs Load = ? GL(s) mr d = d dmr + + Gp m = mr+ dmr y = yd We need to add this amount to maintain y at the same yd
The original control law should be changed to: + dmr New mr In other words, we have to reset the reference input to maintain the steady state
But, how could we update mr automatically?
The control law with updating becomes: Notice that the reference input is now floating!
The same situation happens when yd is changed. The control law after resetting the reference input remains the same proportional form, that is: This reference input has been updated with the integral mode.
This shows that the proportional part is always the fundamental correcting action in a control algorithm. And, the reference input has to be updated (or, reset) from time to time.
This above control algorithm is known As Proportional plus integral control law. The updating of mr is performed in a way of trial-and-error. That is, as long as error exists, the updating continues. The sensitivity of this trial-and-error is controlled by a weight constant, .
The only case where the updating stops is when y equals yd, the integration term stops changing and holds constant. This conceptually tells that if PI control algorithm is used, if the system can lead to a steady state, the steady state should stop at y=yd.
Now, suppose the error has an obvious trend which we need to take into account, the control law can look forward to use the predicted output y, that is . The control algorithm thus becomes:
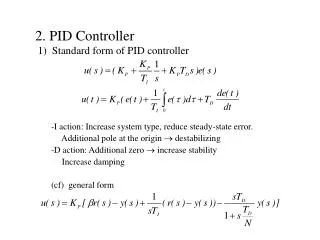
Thus, the control algorithm to take into Account the trend of error becomes: This above control algorithm is known As a proportional-Integral-Derivative control law, abbr. as PID law.
Subtract the second equation from the first one to give the control algorithm in terms of deviation variables:
Transfer function of the conventional PID controller:
The implementation issues • Scaling the variable • Calibration of the parameters in the control algorithm • Realization of derivative mode • Realization forms for PID controller • Prevent from over charged with integral mode • Prevent from bumping in manual-to-auto transfer • Prevent from kicks in proportional and derivative modes
Implementation issues --- scaling the variables
The value KC is calibrated under pure P-control, where, Yd=0 (yd is constant), that is: Thus, when Kc equals one means: 1% change in [PV] will result in 1% change change of [CO] To have 100% change in [CO], we need A 100% change of [PV] Proportional Band =100%
Similarly, when we say a proportional band equals 50, we means: To have a 100% change of [CO], we need only a 50% change of [PV]
How Integral time is calibrated? The integral time is calibrated when P and I control modes are active, that is:
The integral time is defined as the time it takes for the integration mode to repeat the p-output.
Mr is constant without updating Mr is updated with the integral mode
t E(t) P+D tD M(t) P The derivative time is the time that PD- output leads P-output
Realization of a controller means to Implement the algorithm by means of analog devices, such as integrators, R-C- L circuits, etc. What computations can be realized? ---- summation, multiplication with constant gain. What computations cannot be realized? ---- differentiation.
A general rule to justify if a transfer function can be realized is to examine if the transfer function satisfies:
How differentiation is implemented using those realizable elements? Computations to be implemented--- summation, gain, and a 1st-order transfer function:
Thus, the PID control law is implemented As: This PID controllers consists of parallel computations of P, I, and D modes, and is referred as the parallel algorithm.
The above parallel form can be rearranged To become: This form is known as PD-I algorithm.
Because of practical implementation with pneumatic elements, the P,I, and D modes are also arranged into another equivalent form: Which is known as a cascade (or, series) form, i.e. PI-PD algorithm.
As has been mentioned, the derivative mode should only be implemented with approximation, that is: Or, This is known as one of the practical Implementation.
The conversion from the parallel form to the series form: It is obvious that the conversion is true only for:
The conversion from series from to the Parallel form: Notice that each series form has an equivalent Parallel form.
Notice that: Thus, apply PID setting of the parallel algorithm to the series algorithm will result in too aggressive a controller setting----- This mistake is very easily committed with carelessness.
Prevention from derivative kicks Derivative kick
Prevention from proportional kick Proportional kick
Derivative & Proportional on PV Derivative-on-PV
Reset windup What is reset windup? The controller over integrates to exceed 100% of output and needs integration in the reverse direction to bring it back .
When it occurs? Transportation lag exists in the mani- pulation input. Controller output is over-ridded by the other controller and is suspended.
Disturbance enters at here T starts to drop due to Ti drops Controllers starts to react, but T still keeps dropping due to time lag Integration over does ------- reset windup
Low signal selector Override Control