Download
1 / 40
410 likes | 666 Views
Chapter 18: Moving Objects: Throwing, Striking, and Kicking. KINESIOLOGY Scientific Basis of Human Motion, 11th edition Hamilton, Weimar & Luttgens Presentation Created by TK Koesterer, Ph.D., ATC Humboldt State University Revised by Hamilton & Weimar. Objectives.

E N D
Chapter 18:Moving Objects:Throwing, Striking, and Kicking KINESIOLOGY Scientific Basis of Human Motion, 11th edition Hamilton, Weimar & Luttgens Presentation Created by TK Koesterer, Ph.D., ATC Humboldt State University Revised by Hamilton & Weimar
Objectives • Classify activities involving throwing, kicking, or striking patterns according to the nature of the force application. • Name and discuss anatomical and mechanical factors that apply to throwing, kicking, or striking activities. • Perform a kinesiological analysis of a sequential throwing, kicking, or striking skill under each of these force application conditions: momentary contact; projection; continuous application.
SEQUENTIAL MOVEMENTS • Movement of body segments resulting in the production of summated velocity at the end of the chain of segments. • Path produced is curvilinear. • Most frequently used to produce high velocities in external objects. • Depending on objective of skill (speed, accuracy, distance, or combination) modifications to pattern may be made.
Joint Action Patterns • Each pattern involves a preparatory movement referred to as a backswing, or wind up. • This is followed by the establishment of a base of support prior to initiation of • Force phase • Ending in a follow through.
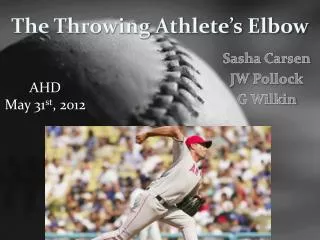
Overarm Pattern • Characterized by rotation of the shoulder joint. • Backswing: abducted arm rotates externally. • Force phase: arm rotates internally. • Some elbow extension, wrist flexion, and spinal rotation. • Rotation of pelvis at the hip joint of opposite limb, resulting in internal rotation of the thigh.
Overarm Pattern Fig 18.2
Underarm Pattern • Consists of forward movement of extended arm. • Basic joint action is arm flexion. Fig 18.4
Sidearm Pattern • Basic movement is medial rotation of the pelvis on the opposite hip with the arm usually in an abducted position. • Arm is moved forward due to pelvic and spinal rotation. • Spine laterally flexes toward throwing arm. • Elbow maintains or is extended slightly. • Wrist flexion may also be part of the action.
Sidearm Pattern Fig 18.5
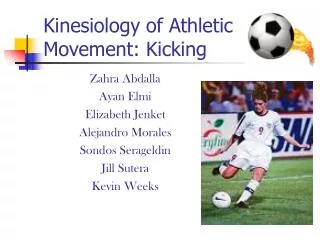
Kicking Pattern • Is a modification of a locomotor pattern in which force is imparted to an external object during forward swing of non-weight bearing limb. • Non-kicking foot is stabilized. • Pelvis is fixed over thigh & rotated toward support leg. • Kicking leg lags behind; abduction & hyperextension. • Kicking leg flexes at hip followed by knee extension.
Kicking Pattern Fig 18.6
Nature of Force Application • Momentary Contact: striking and kicking. • contact made with an object by a moving body part or implement. • Projection: throwing • an object is given some velocity and is released at the desired point.
PRINCIPLES RELATING TO THROWING, STRIKING AND KICKING Anatomical Principles • Muscles contract more forcefully if they are first put on stretch. • Unnecessary movements and tension mean awkwardness and unnecessary fatigue. • Skillful performance can be developed only by practice of the technique. • Most efficient type of movement is ballistic. • Appropriate levers should be used for the task.
Mechanical PrinciplesThrowing • The object will move only if the force is of sufficient magnitude to overcome the object’s inertia. • The pattern and range of joint movements depends on the purpose of the motion. • Force exerted by the body will be transferred to an external object in proportion to the effectiveness of the counterforce of the feet against the ground.
Mechanical PrinciplesThrowing • Linear velocity is imparted to external objects as a result of angular velocity of the body segments. • Optimum summation of internal force is needed if maximum force is to be applied to an object. • For a change in momentum to occur, force must be applied over time.
Mechanical PrinciplesThrowing • Force applied in line with an object’s center of gravity will result in linear motion of the object, provided it is freely movable. • If the force applied to a freely movable object is not in line with it’s center of gravity, it will result in rotary motion of the object.
Striking, Hitting, and Kicking Major factors in the speed of a struck ball: • Speed of incoming ball & striking implement. • Mass of the ball & striking implement. • Elasticity between ball & striking implement. • Direction of ball & implement at impact. • Point of impact between ball & implement.
Mechanical PrinciplesStriking, Hitting, and Kicking • The direction in which the object moves is determined by direction of force applied. • Momentum is conserved in all collisions. • Any change in momentum of colliding objects is related to force and duration of collision. • The greater the velocity of the approaching ball, the greater the velocity of the ball in the opposite direction after it is struck.
Mechanical PrinciplesStriking, Hitting, and Kicking • The greater the velocity of the striking implement at the moment of contact, the greater the velocity of the struck ball. • The greater the mass of the ball, up to a point, the greater its velocity after being struck. • The greater the mass of the striking implement, up to a point, the greater the striking force, and hence the greater the speed of the struck ball.
Mechanical PrinciplesStriking, Hitting, and Kicking • The higher the coefficient of restitution (elasticity) of the ball and of the striking implement, the greater the speed of the struck ball. • The direction taken by the struck ball is determined by four factors: • Direction of striking implement at contact; • Relation of the striking force to ball’s center of gravity; • Degree of firmness of grip and wrist at contact; • Laws of rebound.
EXAMPLES OF THROWING AND STRIKING Analysis of the Overarm Throw • This analysis includes joint actions, muscle activity, and mechanics of the upper extremity only.
Analysis of the Overarm Throw Backswing • The purpose is to place joints in optimal position and involve the greatest number of segments in preparation for the force phase. • Includes pelvic and trunk rotation in the opposite direction, horizontal abduction and lateral rotation at shoulder joint with elbow flexion and wrist hyperextension. • A forward step is taken with the opposite foot, permits greatest ROM in trunk and pelvis, and a large base of support.
Analysis of the Overarm Throw Force Phase • Immediately following establishment of a base of support, pelvis and then trunk rotation are accompanied by lateral flexion to the left. • Trunk motion causes increased horizontal abduction with continuing lateral rotation at the shoulder joint. • Elbow extension is followed by rapid medial rotation at shoulder, forearm pronation, and then flexion and ulnar deviation at wrist. • Ends with release of the ball.
Analysis of the Overarm Throw Follow-through • From ball release until the momentum in the arm can be safely dissipated as the arm continues across the body in a downward direction. • A forward step is also used.
Analysis of the Overarm Throw • Actions proceed from proximal (more massive) to distal (lighter) segments. • Momentum is transferred from more massive (proximal) to less massive (distal) segments, significantly increasing their velocity. • Linear velocity at the end of the chain (ball at release) often can exceed 90 mph. • Legs provide the stable base, contribute significantly to force production and transfer of momentum.
Analysis of the Overarm Throw Shoulder Joint Actions • Lateral rotation preceding the medial rotation is controlled by eccentric contraction of medial rotators followed by concentric contraction of the same medial rotators. • Height of humerus is controlled by static contraction of middle deltoid. • Deltoid & supraspinatous contract concentrically during backswing to position upper arm, and eccentrically during the follow-through to help decelerate the arm.
Analysis of the Overarm Throw Other Muscles Involved • Biceps has peak activity as the elbow is flexed late into backswing, at the beginning of force phase, and again during follow-through. • Latissimus dorsi, active during medial rotation, remains active eccentrically during follow-through. • Trunk rotators are also active.
Analysis of the Overarm Throw Stretch Reflex • An important facilitating mechanism in accelerating the lagging distal segments. • The more rapid the stretch (eccentric contraction), the greater will be the facilitating effect on the resulting concentric contraction of the same muscle. • Forces can be summated more appropriately.
Analysis of the Overarm Throw Other Reflexes • As the trunk rotates under the stationary head (eyes focused on the target), tonic neck reflex may facilitate the strong acceleration occurring during the force phase. • Asymmetric tonic neck reflex facilitates the shoulder abductor and elbow extensors on the chin side, precisely the arm position at release. • Increasing pressure on the hand and weight transfer to forward foot may produce an extensor thrust reflex. • Facilitation of the lower limb extensor muscles. • Facilitation of arm extensors.
Analysis: Forehand Drive in Tennis Description • Objective is to send the ball over the net and deep into the opponent’s court close to the base line. Fig 18.7
Analysis: Forehand Drive in Tennis • Starting Position: Player faces the net with feet about shoulder width apart and the weight of the balls of the feet. • Racket is held with an hand shake grip. • Backswing: Player pivots entire body so that the non-racket side is toward the net. • Racket is taken back at shoulder level, with head of racket above the wrist and the face turned slightly down. • Players’ weight is over the rear foot.
Analysis: Forehand Drive in Tennis Forward Swing • Player flexes at the knees to drop racket below intended contact point, keeping racket head above the wrist. • Steps toward the ball with non-racket foot. • Pelvis and spine rotate so trunk faces forward, and weight is shifted to forward foot as racket is swung forward and up. • Racket face is perpendicular to court at ball impact, imparting topspin to the ball.
Analysis: Forehand Drive in Tennis Follow-Through • Follow-through continues toward the intended target, with the racket arm swinging across the body and up.
Analysis: Forehand Drive in Tennis Anatomical Factors • Action is ballistic in nature. • Initiated by muscular force, continued by momentum, and finally terminated by the contraction of antagonistic muscles. • Chief levers: arm, trunk, and racket. • Fulcrum: at opposite hip joint. • Point of force application: at a point of the pelvis representing combined forces of the muscles producing the movement.
Analysis: Forehand Drive in Tennis Anatomical Factors • Resistance application point: at the center of gravity of the trunk-arm-racket lever. • May be considered the point of contact with the ball at the moment of impact. • Additional lever actions due to rotation of the spine, horizontal adduction at shoulder, and flexion at wrist. • Muscular Strength: shoulder abductors assisting with swing, & rotators of spine and pelvis.
Analysis: Forehand Drive in Tennis Mechanical Analysis • Purpose is to return ball in the court, but also to make it difficult to return. • Requires both high speed and accuracy. • Force of impact: speed of racket at moment of contact. • Straight backswing: ease of control, but must overcome inertia. • Circular backswing: greater distance to build momentum.
Analysis: Forehand Drive in Tennis Mechanical Analysis • Arm fully extended to increase lever length. • Effort to resist force of ball is less when the racket lever arm is shortened. • Take less time to swing a shortened racket lever into position. • Concentration of mass at shoulder level moving forward at impact ensures maximum speed of striking.
Analysis: Forehand Drive in Tennis Mechanical Analysis • Skillful players use a heavier racket - greater mass of implement greater striking force. • A new ball and well strung racket ensure good coefficient of restitution (elasticity). • Shift weight while striking the ball to increase ground reaction force imparted to body & ball. • Firm wrist and grip are essential for maximum impulse to be applied by the racket to the ball.
Analysis: Forehand Drive in Tennis Mechanical Analysis • Direction of struck ball is determined by: • Direction of implement at impact. • Relation of striking force to ball’s center of gravity, control of spin. • Firmness of grip and wrist at impact. • Angle of incidence.