Download
1 / 64
820 likes | 1.6k Views
Magnetic field and magnetic flux. Magnetic flux density. แม่เหล็กไฟฟ้า.

E N D
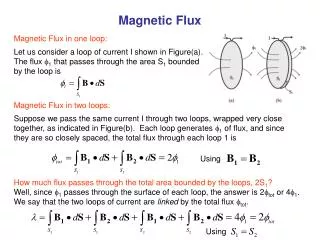
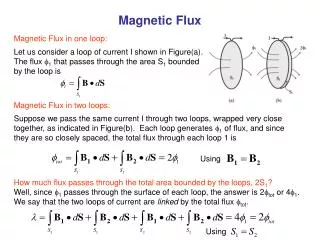
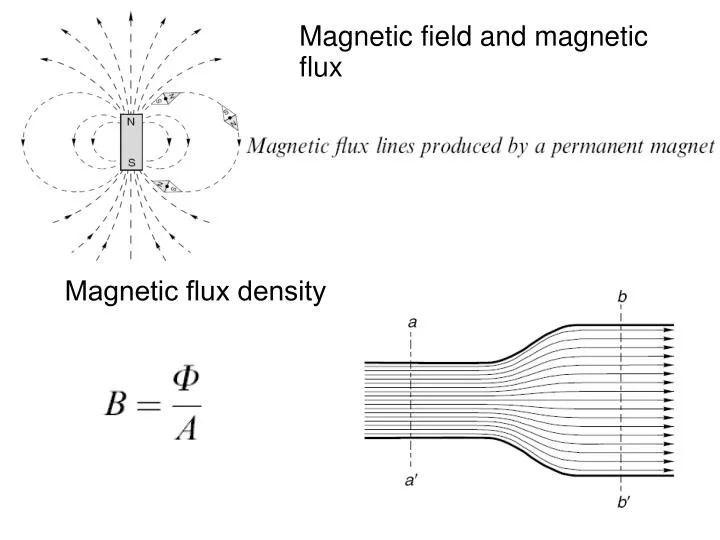
Magnetic field and magnetic flux Magnetic flux density
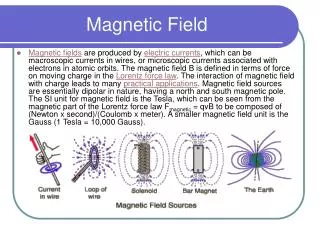
แม่เหล็กไฟฟ้า • นักวิทยาศาสตร์ชาวสวีเดนชื่อ ฮันซ์คริสเตียนเออร์สเตด (Hans Christian Oersted) ได้ค้นพบความสัมพันธ์อย่างหนึ่ง โดยบังเอิญขณะที่เขาทำการทดลองปล่อยกระแสผ่านเข้าไปใน เส้นลวด ตัวนำเส้นหนึ่ง และมีเข็มทิศวางอยู่ใกล้ๆกับเส้นลวดที่มีกระแสไหลผ่าน เข็มทิศเกิดการบ่ายเบนไปจากแนวเดิมเออร์สเตดทดลองกลับทิศทางการ ไหลของกระแสเข็มทิศก็เกิดการบ่ายเบนไปอีกเช่นกันโดยมีทิศทางตรงกันข้ามกับครั้งแรก • เออร์สเตดสรุปผลการทดลองครั้งนี้ว่า “เมื่อมีกระแสไหลผ่านเส้นลวดตัวนำจะเกิดเส้นแรงแม่เหล็กขึ้นมารอบๆ เส้นลวดตัวนำนั้น” ลักษณะเส้นแรงแม่เหล็กที่เกิดขึ้นรอบ เส้น ลวดตัวนำเกิดขึ้นเป็นลักษณะวงกลมล้อมรอบเส้นลวดตัวนำลักษณะการเกิดเส้นแรงแม่เหล็กรอบ เส้นลวดลวดตัวนำ แสดงดังรูป
PRODUCING ROTATION Returning to the matter of force on a single conductor, we will Wrst look at what determines the magnitude and direction of the force.
Force on a conductor The force on a wire of length I, carrying a current I and exposed to a uniform magnetic flux density B throughout its length is given by the simple expression where F is in newtons when B is in tesla, I in amperes, and l in metres.
Magnetomotive force (MMF) MMF = NI The MMF of the coil is simply the product of the number of turns (N) and the current (I), and is thus expressed in ampere-turns
In the electric circuit, current and EMF are related by Ohm’s Law, which is Electric circuit analogy The magnetic Ohm’s law is then
Reluctance and air-gap flux densities where an MMF of NI is applied directly across an air-gap of length g. In passing, we should note that if we want to include the reluctance of the iron part of the magnetic circuit in our calculation, its reluctance would be given by
To calculate the Flux, F, we use the magnetic Ohm’s law , which gives We are usually interested in the Xux density in the gap, rather than the total Xux, so we use equation 1.1 to yield example, suppose the magnetising coil has 250 turns, the current is 2 A, and the gap is 1 mm. The flux density is then given by
TORQUE PRODUCTION Magnitudeoftorque T = Fr
SPECIFIC LOADINGS AND SPECIFIC OUTPUT Specific loadings The specific magnetic loading (B) is the average of the magnitude of the radial Flux density over the entire cylindrical surface of the rotor The specific electric loading (A) is the axial current per metre of circumference on the rotor.
Torque and motor volume Considering an area of the rotor surface of width w and length L.
Specific output power – importance of speed In the SI system, the unit of work or energy is the Joule (J). One joule represents the work done by a force of 1 newton moving metre in its own direction. Hence the work done (W) by a force F which moves a distance d is given by
Specific output power – importance of speed ;power per rotor unit vol.
มอเตอร์ไฟฟ้า • คำนิยามของมอเตอร์ไฟฟ้า • หลักการทำงานของมอเตอร์ไฟฟ้า • ประเภทของมอเตอร์ไฟฟ้า • มอเตอร์ไฟฟ้ากระแสตรง • มอเตอร์ไฟฟ้ากระแสสลับ • การประยุกต์ใช้งานมอเตอร์ไฟฟ้า มอเตอร์คือเครื่องกลไฟฟ้า (Electormechanical Energy) ที่ทำหน้าที่เปลี่ยนพลังงานไฟฟ้า (Electric Energy) ให้เป็นพลังงานกล (Mechanical Energy) ในรูปของการหมุนเคลื่อนที่ มีประโยชน์ในการนำไปใช้งานได้อย่างกว้างขวาง ถูกนำไปร่วมใช้งานกับอุปกรณ์ไฟฟ้า เครื่องมือไฟฟ้า และเครื่องใช้ไฟฟ้าถึงประมาณ 80-90% ลักษณะมอเตอร์ไฟฟ้า (Electric Motor) แสดงดังรูป
มอเตอร์ไฟฟ้ากระแสตรง • มอเตอร์ไฟฟ้ากระแสตรงประกอบด้วย แม่เหล็กถาวร 2 ขั้ววางอยู่ระหว่างขดลวดตัวนำ ขดลวดตำนำจะได้รับแรงดันไฟตรงป้อนให้ในการทำงาน ทำให้เกิดอำนาจแม่เหล็ก 2 ชุด มีขั้วแม่เหล็กเหมือนกันวางใกล้กัน เกิดแรงผลักดันทำให้ขดลวดตัวนำหมุนเคลื่อนที่ได้ การทำงานเบื้องต้นของมอเตอร์ไฟฟ้ากระแสตรง แสดงดังรูป
จากสมการ F= ILB • F(N) = แรงผลักของขดลวด • I (A) = กระแสที่ไหลในขดลวด • B (T) = ความหนาแน่นของฟลักซ์แม่เหล็ก • L (m) = ความยาวของขดลวด
มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor) • มอเตอร์แบบอนุกรม (Series Motor) • มอเตอร์แบบอนุขนาน (Shunt Motor) • มอเตอร์แบบผสม (Compound Motor) มี 2 ประเภท • มอเตอร์แบบผสมสั้น(Short Shunt Compound Motor) • มอเตอร์แบบผสมยาว (Long Shunt Compound Motor)
มอเตอร์ไฟฟ้ากระแสตรง-ส่วนประกอบมอเตอร์ไฟฟ้ากระแสตรง-ส่วนประกอบ • สเตเตอร์(Stator) เป็นส่วนที่อยู่กับที่ ประกอบด้วย • Frame,Yoke เป็นโครงภายนอกทำหน้าที่เป็นทางเดินของเส้นแรงแม่เหล็กและยึดส่วนประกอบอื่นๆ ทำด้วยเหล็กหล่อหรือเหล็กแผ่นหนาม้วนเป็นรูปทรงกระบอก • Pole ขั้วแม่เหล็ก แผ่นเหล็กบางๆ กั้นด้วยฉนวน ประกบกันเป็นแท่งติดอยู่ที่เฟรม
มอเตอร์ไฟฟ้ากระแสตรง -ส่วนประกอบ • ขดลวดสนามแม่เหล็ก (Field Coil) จะพันอยู่รอบๆแกนขั้วแม่เหล็ก ทำหน้าที่รับกระแสตรงจากภายนอก เพื่อสร้างเส้นแรงแม่เหล็กหรือสนามแม่เหล็กให้เกิดขึ้น และเส้นแรงแม่เหล็กนี้จะเกิดการหักล้างและเสริมกันกับสนามแม่เหล็กของขดลวดอาเมเจอร์ที่โรเตอร์ ทำให้เกิดแรงบิดขึ้น
มอเตอร์ไฟฟ้ากระแสตรง -ส่วนประกอบ • ตัวหมุน (Rotor) เป็นส่วนที่มีการเคลื่อนที่ • แกนเพลา (Shaft) เป็นตัวสำหรับยึดคอมมิวเตเตอร์ และยึดแกนเหล็กอาร์มาเจอร์ (Armature Core) • แกนเหล็กอาร์มาเจอร์ (Armature Core) ทำด้วยแผ่นเหล็กบางอาบฉนวน (Laminated Sheet Steel) เป็นที่สำหรับพันขดลวดอาร์มาเจอร์ซึ่งสร้างแรงบิด (Torque)
มอเตอร์ไฟฟ้ากระแสตรง -ส่วนประกอบ • ขดลวดอาร์มาเจอร์ (Armature Winding) เป็นขดลวดพันอยู่ในร่องสลอท (Slot) ของแกนอาร์มาเจอร์ ขนาดของลวดจะเล็กหรือใหญ่และจำนวนรอบมากหรือน้อยขึ้นอยู่กับการออกแบบ • แปรงถ่าน (Brushes) ทำด้วยคาร์บอนมีรูปร่างเป็นแท่งสี่เหลี่ยมพื้นผ้า สัมผัสกับซี่คอมมิวเตเตอร์ตลอดเวลาเพื่อรับและส่งกระแสไฟฟ้าระหว่างขดลวดอาร์มาเจอร์ กับวงจรไฟฟ้าจากภายนอก
มอเตอร์ไฟฟ้ากระแสตรง -ส่วนประกอบ • คอมมิวเตเตอร์ (Commutator) ทำด้วยทองแดงเป็นซี่แต่ละซี่มีฉนวนไมก้า (mica) คั่นกลาง ส่วนหัวซี่ของคอมมิวเตเตอร์จะมีร่องสำหรับใส่ปลายสายของขดลวดอาร์มาเจอร์ ตัวคอมมิวเตเตอร์นี้อัดแน่นติดกับแกนเพลา เป็นรูปกลมทรงกระบอก มีหน้าที่สัมผัสกับแปรงถ่าน (Carbon Brushes) เพื่อรับกระแสจากสายป้อนเข้าไปยัง ขดลวดอาร์มาเจอร์
มอเตอร์ไฟฟ้ากระแสตรง เมื่อป้อนพลังงานไฟฟ้ากระแสตรงเข้าไป พลังงานกลที่ได้จะอยู่ในรูปของการหมุนของโรเตอร์ ซึ่งทำให้เกิดแรงดันเหนี่ยวนำอาร์เมเจอร์ Eaและแรงบิดแม่เหล็กไฟฟ้า Te บนอาร์เมเจอร์ ดังสมการ การทำงานของมอเตอร์กำหนดโดยความสัมพันธ์ระหว่างแรงบิด ความเร็ว และกระแสอาร์เมเจอร์ ดังสมการต่อไปนี้
มอเตอร์ไฟฟ้ากระแสตรงแบบอนุกรมมอเตอร์ไฟฟ้ากระแสตรงแบบอนุกรม มอเตอร์แบบอนุกรม (Series Motor)คือมอเตอร์ที่ต่อขดลวดสนามอนุกรมกับขดลวดอาร์เมเจอร์ (Series Field) ให้แรงบิดสูง ความเร็วรอบเมื่อไม่มีโหลดจะสูงมาก จึงต้องต่อโหลด ความเร็วรอบจะลดลงเมื่อโหลดเพิ่มขึ้น การใช้งาน เหมาะกับงานแรงบิดสูง ใช้กระแสมาก คือ ต้นกำลังของรถไฟฟ้า รถยกของ เครนไฟฟ้า เครื่องใช้ไฟฟ้า เช่น เครื่องดูดฝุ่น เครื่องผสมอาหาร สว่านไฟฟ้า จักรเย็บผ้า เครื่องเป่าผม
มอเตอร์ไฟฟ้ากระแสตรงแบบขนานมอเตอร์ไฟฟ้ากระแสตรงแบบขนาน มอเตอร์แบบขนาน(Shunt Motor) มอเตอร์แบบขนานนี้ ขดลวดสนามแม่เหล็ก(Field Coil) จะต่อขนานกับขดลวด ชุดอาเมเจอร์ แรงบิดเริ่มหมุนต่ำ แต่ความเร็วรอบคงที่ การใช้งาน มอเตอร์ขนานส่วนมากเหมะกับงานควบคุมความเร็ว สามารถเลื่อนช่วงการทำงานได้ เช่น พัดลมเพราะพัดลมต้องการความเร็วคงที่และต้องการเปลี่ยนความเร็วได้ง่าย ถ้าแรงดัน Vt ที่ป้อนมีค่าคงที่ กระแส If และ คงที่ จะได้
มอเตอร์ไฟฟ้ากระแสตรงแบบผสมมอเตอร์ไฟฟ้ากระแสตรงแบบผสม มอเตอร์แบบผสม (Compound Motor) มอเตอร์แบบผสมนี้ มีคุณลักษณะพิเศษคือมีแรงบิดสูง (High staring torque) แต่ความเร็วรอบคงที่ ตั้งแต่ยังไม่มีโหลด จนกระทั้งมีโหลดเต็มที่ มอเตอร์แบบผสมมีวิธีการต่อขดลวด 2 วิธี 1. ต่อขดลวดแบบขนานขนานกับอาเมเจอร์เรียกว่า ชอทชันท์ หรือมอเตอร์แบบผสมสั้น(Short Shunt Compound Motor) มอเตอร์แบบผสมสั้น
ความเร็วพิกัด แบบขนาน แบบผสม แบบอนุกรม แรงบิดพิกัด • มอเตอร์ไฟฟ้ากระแสตรงแบบผสม 2. ต่อขดลวดขนาน ขนานกับขดลวดอนุกรมและขดลวดอาเมเจอร์เรียกว่า ลองชั้นท์คอมเปาวด์มอเตอร์หรือแบบผสมยาว (Long shunt motor) เส้นโค้งลักษณะความเร็ว-แรงบิด
มอเตอร์ไฟฟ้ากระแสสลับมอเตอร์ไฟฟ้ากระแสสลับ มอเตอร์ไฟฟ้ากระแสสลับ คือ มอเตอร์ที่ป้อนไฟฟ้ากระแสสลับเข้าไปเพื่อให้ได้พลังงานกลออกมา โครงสร้างของมอเตอร์คล้ายมอเตอร์กระแสตรง แต่จำนวนเฟสมีทั้ง 1 เฟสและ 3 เฟส โดย 3เฟสจะมีจำนวนขดลวดจะเพิ่มเป็น 3 ชุด มอเตอร์กระแสสลับนิยมใช้งานทุกประเภทตั้งแต่อุปกรณ์ขนาดเล็กไปจนถึงในอุสาหกรรมทุกประเภท เนื่องจากมีราคาถูกกว่าเครื่องจักรกลไฟฟ้ากระแสตรง สามารถต่อกับไฟฟ้ากระแสสลับได้โดยง่าย และมีการบำรุงรักษาน้อย นิยมใช้งานของมอเตอร์แบบเหนี่ยวนำ(induction motor) เป็นจำนวนมาก
มอเตอร์ไฟฟ้ากระแสสลับ(Alternating Current Motor) • มอเตอร์ไฟฟ้ากระแสสลับชนิด 1 เฟส • Split-Phase motor • Capacitor motor • Repulsion-type motor • Universal motor • Shaded-pole motor • มอเตอร์ไฟฟ้ากระแสสลับชนิด 3 เฟส • Synchronous motor • Asynchronous motor(Induction motor)
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Split phase motor • Split phase motor หรือ มอเตอร์แบบแยกเฟส • เป็นมอเตอร์ไฟฟ้ากระแสสลับเฟสเดียวแบบเหนี่ยวนำ • ใช้กันอย่างแพร่หลายในปัจจุบัน เช่น ตู้เย็น เครื่องซักผ้า ปั้มน้ำขนาดเล็ก โบลเวอร์ (Blowers) ปั้มแรงเหวี่ยง (Centrifugal pumps) เครื่องล้างขวด เครื่องดนตรีอัตโนมัติ เป็นต้น • มีขนาดตั้งแต่ 1/4 , 1/3 ,1/2 แรงม้า แต่จะมีขนาดไม่เกิน 1 แรงม้า
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Split phase motor • ส่วนประกอบ • Stator ทำด้วยเหล็กแผ่นลามิเนท มีร่องเป็นแบบกึ่งปิด โครงทำด้วยเหล็กหล่อหรือเหล็กเหนียว ขดลวดที่พันไว้ในร่องของ สเตเตอร์มีสองชุด ( เป็นลวดทองแดงอาบด้วยฉนวนไฟฟ้า) คือขดลวดช่วย (Auxiliary winding) หรือขดสตาร์ท(Starting winding) และขดลวดหลัก(Main winding) หรือขดรัน (Running winding)
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Split phase motor • ส่วนประกอบ • Rotor โรเตอร์ทำด้วยเหล็กแผ่นบาง ๆ อัดซ้อนกัน มีร่องไปทางยาวซึ่งจะมีแท่งทองแดงหรือแท่งอลูมิเนียมฝังอยู่โดยรอบ • ปลายของแท่งทองแดงหรือแท่งอลูมิเนียมจะเชื่อมติดกันด้วยวงแหวนซึ่งมีลักษณะคล้ายกรงกระรอก เรียกโรเตอร์แบบนี้ว่า • โรเตอร์กรงกระรอก ( Squirrel cage rotor )
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Split phase motor • ส่วนประกอบ • สวิทช์แรงเหวี่ยง (Centrifugal switch) สวิทช์แรงเหวี่ยงติดตั้งอยู่ภายในมอเตอร์ มีหน้าที่ตัดขดสตาร์ทออกจากวงจร หลังจากโรเตอร์หมุนได้ความเร็วประมาณ 75 % ของความเร็วเต็มพิกัด โดยทั่วไปสวิทช์แรงเหวี่ยงประกอบด้วยส่วนประกอบสองส่วนคือ ส่วนที่อยู่กับที่จะอยู่กับฝาครอบมอเตอร์ ส่วนที่หมุนจะอยู่ที่เพลาโรเตอร์
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Split phase motor • คุณลักษณะของมอเตอร์แบบแยกเฟส • ใช้หลักการเหนี่ยวนำทางแม่เหล็กไฟฟ้า • ขดลวดรันและขดลวดสตาร์ทวางทำมุมกัน 90 องศาไฟฟ้าเพื่อทำให้เกิดสนามแม่เหล็กหมุน แล้วจะไปเหนี่ยวนำให้เกิดกระแสไฟฟ้าในขดลวดโรเตอร์ ซึ่งกระแสนี้จะสร้างสนาม แม่เหล็กและไปผลักกับสนามแม่เหล็กที่สเตเตอร์จนทำให้โรเตอร์หมุน • เมื่อโรเตอร์หมุนด้วยความเร็ว 75 เปอร์เซนต์ของพิกัด สวิตช์แรงเหวี่ยงหนีศูนย์กลางจะตัดขดลวดสตาร์ทออกจากวงจร
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Capacitor motor • มอเตอร์แบบคาปาซิเตอร์ (Capacitor motor) มี 3 แบบ • มอเตอร์แบบคาปาซิเตอร์สตาร์ท (Capacitor-start Induction Motor) • มอเตอร์แบบเปอร์มาเนนท์-สปลิตคาปาซิเตอร์ (Permanent-split capacitor motor) • มอเตอร์แบบคาปาซิเตอร์สองค่า (Two-value capacitor motor)
มอเตอร์ไฟฟ้ากระแสสลับ1เฟส-Capacitor start motor • คุณลักษณะของมอเตอร์แบบคาปาซิเตอร์ (Capacitor start motor) • คล้ายมอเตอร์แบบแยกเฟส แต่ขดสตาร์ทต่ออนุกรมกับคาปาซิเตอร์ ซึ่งมีขนาดใหญ่กว่ามอเตอร์แบบแยกเฟส และพันจำนวนรอบมากขึ้นกว่าขดลวดชุดรัน • แรงบิดขณะสตาร์ทสูงกว่ามอเตอร์แบบแยกเฟสเพราะคาปาซิเตอร์ทำให้กระแสของขดสตาร์ท (Auxiliary winding)นำหน้ากระแสของขดรัน (Main winding) • คาปาซิเตอร์ที่ใช้เป็นชนิดอิเล็กทรอไลต์ (Electrolytic capacitor) • มีขนาด 0.37-7.5 กิโลวัตต์ (10 แรงม้า) ใช้กับงาน เครื่องทำความเย็น
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Capacitor motor • คุณลักษณะของ Permanent-split capacitor motor • เรียก คาปาซิเตอร์รัน จะไม่มี starting switch ดังนั้นคาปาซิเตอร์และขดลวดช่วยจะต่ออนุกรมตลอดเวลา ไม่ถูกตัดออกจากวงจร • ให้แรงบิดเริ่มต้นที่ต่ำกว่ามาก แต่ค่าเพาเวอร์แฟกเตอร์ดีขึ้น • เหมาะกับงานขับโหลดด้วยสายพานและโหลดที่ยึดติดกับแกนเพลาของมอเตอร์โดยตรง เช่นมอเตอร์พัดลมของเครื่องปรับอากาศ พัดลมเพดาน พัดลมดูดอากาศ
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Capacitor motor • คุณลักษณะของ มอเตอร์แบบคาปาซิเตอร์สองค่า • (Two-value capacitor motor) • ใช้คาปาซิเตอร์สองตัวหรือสองค่าต่อขนานกัน คาปาซิเตอร์ตัวแรกเป็นชนิดอิเล็กทรอไลติก ทำหน้าที่เป็นคาปาซิเตอร์สตาร์ท อีกตัวหนึ่งเป็นคาปาซิเตอร์ชนิดบรรจุน้ำมันทำหน้าที่เป็นคาปาซิเตอร์รัน • คาปาซิเตทั้งสองตัวจะทำให้ค่าความจุสูงขึ้น มอเตอร์มีแรงบิดเริ่มหมุนสูง • ใช้กับงาน เครื่องจักรงานไม้ งานโลหะ
มอเตอร์ไฟฟ้ากระแสสลับ 1เฟส- Universal motor • คุณลักษณะของ มอเตอร์แบบยูนิเวอร์แซล (Universal motor) • เป็นมอเตอร์ขนาดเล็ก ใช้ได้ทั้งกระแสตรงหรือมอเตอร์กระแสสลับชนิด 1 เฟส • ขดลวดอาร์เมเจอร์และขดลวดสนามแม่เหล็กจะต่ออนุกรมกัน เมื่อจ่ายไฟฟ้าเข้าจะเกิดขั้วแม่เหล็กขึ้นที่ตัวอาร์เมเจอร์ และที่ขั้วสนามแม่เหล็ก ทำให้เกิดแรงผลักกันทำให้มอเตอร์หมุนไปได้ • ให้แรงบิดเริ่มหมุนสูงและความเร็วรอบสูงมากเมื่อหมุนไร้โหลด เหมือนมอเตอร์กระแสตรงแบบอนุกรม แต่มีค่าไม่คงที่เพราะขึ้นกับโหลด • มอเตอร์ขนาดเล็กมีขนาดกำลังไฟฟ้าตั้งแต่ 30-300 วัตต์ • ตัวขับเครื่องใช้ไฟฟ้าภายในบ้าน เช่น เครื่องบดและผสมอาหาร มีดโกนหนวดไฟฟ้า เครื่องนวดไฟฟ้า มอเตอร์จักรเย็บผ้า สว่านไฟฟ้า เป็นต้น
มอเตอร์ไฟฟ้ากระแสสลับ 3เฟส มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส มอเตอร์ที่ป้อนไฟฟ้า 3 เฟส เข้าไปเพื่อสร้างสนามแม่เหล็กหมุน เป็นมอเตอร์ขนาดใหญ่ มี 2 ประเภทแบ่งตามหลักการทำงาน 1. มอเตอร์แบบอะซิงโครนัสหรือมอเตอร์เหนี่ยวนำ (Asynchronous Motor or Induction Motor) ใช้หลักการเหนี่ยวนำแม่เหล็กไฟฟ้าระหว่างสเตเตอร์และโรเตอร์ แบ่งเป็น 2 แบบคือ - แบบโรเตอร์กรงกระรอก (Squirrel Cage Rotor Type) - แบบโรเตอร์พันขดลวด (Wound Rotor) 2. มอเตอร์แบบซิงโครนัส (Synchronous Motor) คือ มอเตอร์ที่หมุนด้วยความเร็วซิงโครนัส สนามแม่เหล็กหมุนที่เกิดในสเตเตอร์จะเหนี่ยวนำให้สนามแม่เหล็กที่โรเตอร์หมุนด้วยความเร็วสอดคล้องกัน เป็นความเร็วซิงโครนัส
มอเตอร์ไฟฟ้ากระแสสลับ 3เฟส-Asynchronous Motor • มอเตอร์แบบอะซิงโครนัสหรือมอเตอร์เหนี่ยวนำ • (Asynchronous Motor or Induction Motor) • นิยมเรียกมอเตอร์เหนี่ยวนำ 3 เฟส • ความเร็วรอบขึ้นอยู่กับความถี่(Frequency)ของแหล่งกำเนิดไฟฟ้ากระแสสลับ จึงมีความเร็วคงที่ แต่จะเปลี่ยนตามโหลด แรงบิดเริ่มหมุนต่ำ • โครงสร้างไม่ซับซ้อน สะดวกในการบำรุงรักษาเพราะไม่มีคอมมิวเตเตอร์ ราคาถูก ขนาดตั้งแต่ 1/2 แรงม้า ถึง 400 แรงม้า • ใช้กับงานโรงงานอุตสาหกรรม ขับเคลื่อนลิฟท์ สายพานลำเลียง เครื่องไส เครื่องกลึง
มอเตอร์ไฟฟ้ากระแสสลับ 3เฟส-Asynchronous Motor • ส่วนประกอบของมอเตอร์เหนี่ยวนำ (Induction Motor) • Stator จะมีขดลวดอาร์เมเจอร์พันที่ขั้วแม่เหล็ก 3 ชุด อาจต่อเดลต้า หรือแบบวายก็ได้ มีหน้าที่สร้างสนามแม่เหล็กหมุน ไปเหนี่ยวนำให้กระแสไหลและเกิดสนามแม่เหล็กที่โรเตอร์