Download
1 / 12
120 likes | 283 Views
Fingerprint Matching by Using Unit Circle Parameterization. The conference on Korea Multimedia Society (KMMS) 18~19 May 2007, Hannam UNIV., Daejeon, Korea Graduate School of Design & IT, Dongseo UNIV., Busan, Korea Joon Jae Lee, Byung Gook Lee Nam Seok Choi sugi@dit.dongseo.ac.kr.

E N D
Fingerprint Matching by Using Unit Circle Parameterization The conference on Korea Multimedia Society (KMMS) 18~19 May 2007, Hannam UNIV., Daejeon, Korea Graduate School of Design & IT, Dongseo UNIV., Busan, Korea Joon Jae Lee, Byung Gook Lee Nam Seok Choi sugi@dit.dongseo.ac.kr
( ( ) ) j i j i 1 1 · · · · m n p = ( ) h µ d i t t t t r n a s s a n x y , ; k k k k t q p ½ j i A fast expected time algorithm input two point sets P and Q and the parameters , and . Step 1. Precomputations a) For each point in P find the nearest neighbors (in order of closeness) and store in nearest neighbor list. Do the same for Q. b) Divide the smallest square into which Q fits into a two dimensional array of squares of side length . Let each entry in the array contain a list of the points in Q that lie in that square. This will allow us to quickly check whether there is a point in Q at a given coordinate. Step 2. until a global match is found, for each and Determine whether the nearest neighbors of matches the nearest neighbors of . Let T be the similarity transformation that gave the local match. Check whether T can be improved to give a global match. Setp3. output T and the matching pairs.
Fingerprint Feature Points • Input Data Point Set Q Point Set P
Delaunay Triangulation • Guibas, L. and Stolfi, J., "Primitives for the Manipulation of General Subdivisions and the Computation of Voronoi Diagrams", ACT TOG, 4(2), April, 1985. Point Set Q Point Set P
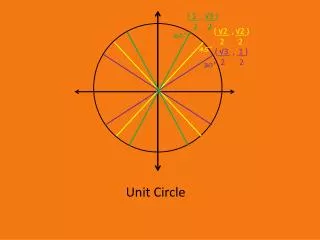
4[-0.686, -0.600] 5[-1.048, -0.562] 3[0.305, -0.543] 2[0.724, -1.400] 6[-1.962, -1.438] [-0.457, -1.705] 1[0.095, -2.048] 0[-0.743, -2.181] Parameterization • M. S. Floater, "Parametrization and smooth approximation of surface triangulations", Comp. Aided Geom. Design 14 (1997)
E A A P A Q M i i t t t ¡ x r a r e a r e a s e r e a s e n m u m = = = Local Matching • Comparison-Area Method • If (ExtraArea is 0) Then AreaPset and AreaQset are same. -
Calculate Transformation • k-least square estimation • S.H.Chang – "Fast Algorithm For Point Pattern Matching : Invariant To Translations, Rotations and Scale Changes. " • Appendix – A formula which gives the least-squares estimation of registration parameters between two corresponding point subsets.
µ ¶ µ 0 ¶ µ 1 ¶ µ ¶ µ µ i t t ¡ s c o s s s n x x C P Q P ¡ i i r x x = Q i i + ¡ e = 1 µ ¶ µ ¶ µ µ i 1 0 t t ¡ x s s n y s c o s y x y Q Q Q P P i i i i i B C y y + ¡ = B C µ 0 1 y x s c o s y Q Q P i i i @ A µ i s s n P Q t t s e s e ! k-least square estimation
Experimentation - Generate Data Rotation : 30 degree Translation : x = -0.2, y = 0.3 Scale : 0;8 - Triangulation
Experimentation - Overlap Two Points Set - Overlap Two Points Set