Download
1 / 10
100 likes | 278 Views
Design of a Pneumatic Inverted Pendulum. By Joshua Geating 3/19/2012. Dr. Paul Oh Drexel Autonomous Systems Laboratory. Background, Motivation. The Inverted Pendulum is a classical model of control theories Robots Aircraft Industrial systems Practical lab for teaching

E N D
Design of a Pneumatic Inverted Pendulum By Joshua Geating 3/19/2012 Dr. Paul Oh Drexel Autonomous Systems Laboratory
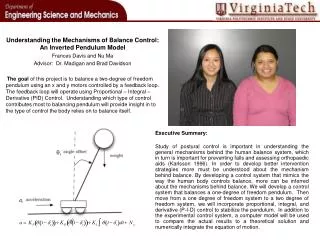
Background, Motivation • The Inverted Pendulum is a classical model of control theories • Robots • Aircraft • Industrial systems • Practical lab for teaching • Low cost components • Textbook replacement
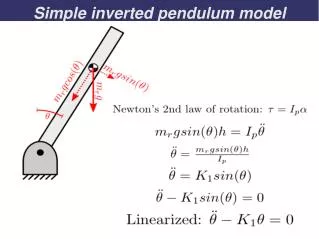
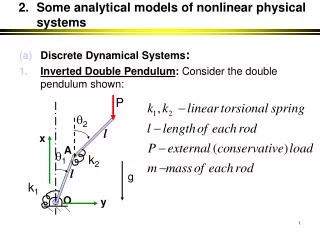
Theory • Lagrange’s Equation • State Space Model
Theory Ctd. • Linear Quadratic Regulator higher = greater control higher = control input lessened Initial condition: 2 degrees
System Parameters • Pendulum: • 408 grams • 44 cm Axis to COG • Cart • 430 grams • ~1 N friction • Piston • 60 psi • ~4.5 N friction
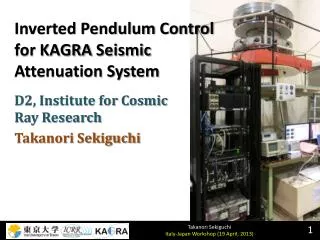
System Overview Microcontroller Proportional Valve Power Supply Linear Encoder Cart Piston Angular Encoder
Current System Performance • Unstable • No more than 5-10 seconds of effective response • Vibrations vs. sluggish response • Function of Q and R weight • Oscillations • Result of velocity algorithm • Stroke length • 15 cm total travel distance
Complications • Asymmetric proportional valve output • Unequal system response • Linear and Angular Velocity sensing • Moving average vs. single value • Rotational Encoder Drift • Vibrations • Manual Shaking
Future Work • Weighted Moving Average • Encoder Counter • DigitalWriteFast() • Data logging • Larger Stroke Piston