Download
1 / 31
800 likes | 2.23k Views
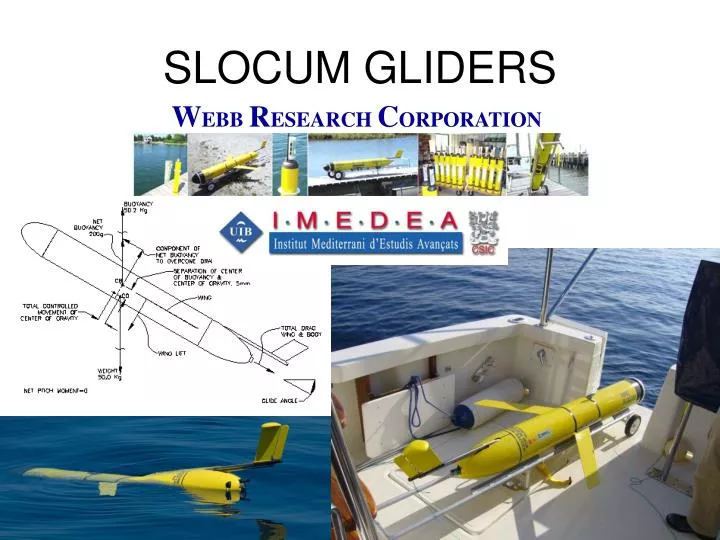
SLOCUM GLIDERS. Gliders. Slocum glider - Webb Research Corporation IMEDEA: 2 units + 2 new units by September 2008. Bluefin glider – Spray - MIT. Seaglider – Univ. Wash. Nose Dome. Forward Hull Section. Wings. Payload Bay Mid Hull Section. Aft Hull Section. Aft Tail Cone. Antennas.

E N D
Gliders Slocum glider - Webb Research Corporation IMEDEA: 2 units + 2 new units by September 2008 Bluefin glider – Spray - MIT Seaglider – Univ. Wash.
Nose Dome Forward Hull Section Wings Payload Bay Mid Hull Section Aft Hull Section Aft Tail Cone Antennas Wings Fin Flap Start Connector Burn Wire Weigth Glider Structure
Glider Hulls Structure 3 Separated hulls sealed using o-rings permit 200 or 1000 meters depth.
Glider Structure Connection The entire structure is joined using a long screw. The different electronic parts and batteries on different hulls are connected using connectors.
INTERNAL COMPONENTS Fin Flap Antennas Ballast Pump Pitch Batteries Leak Sensor Science Electronic Control Electronic Roll Batteries Leak Sensor Air Bladder Glider Internal Parts
Glider Sensors • Oceanographic Sensors • CTD • Oxigen • Fluorometer/Turbidity • Navigation Sensors • GPS • 3-Axis Compass • Pressure Sensor OXY CTD FLU/TURB
Glider Actuators Pitch Batteries Buoyancy Pump Air Bladder Fin Flap
Glider Electronic • 2 Electronic Boards: • Navigation / Control Board • Control all communications: • Satellite Iridium • Satellite Argos • RF FreeWave 900MHz • Control of navigation using: • Compass, Depth and GPS sensors • Samples data from Science Board • Saves all sensing data in files • Science Board • Captures all Oceanographic sensors • Sampling rate typical: 0,5 Hz. • Low (consumption and power) computer
Glider Communications On surface the glider inflates the air bladder in order to lift the communication antennas. Dockserver The glider establishes a data transfer using Iridium satellite communications. Also Argos satellite Communication is used to indicate the position in case of Iridium fails. A low range (2,4 nm) RF communication protocol is used to control the glider on launches and recoverys.
Depth Angle climb Angle dive Navigation Distance Glider Navigation Zig-Zag behaviour 26º Angle 40 cm/s speed (without currents) 1 month aprox. measuring oceanographic data
UP Battery Bottle Silica Lead DOWN RIGHT LEFT Pump Pitch Science Electronic Tail Glider Ballasting - The glider must be accurately ballasted for the target water density, changing the weight to reach the neutral bouyancy and its distribution to reach zero attitude (pitch and roll). Must have totally neutral buoyancy on target surface water
Glider Navigation Principles Surface On surface the glider inflates the air bladder in order to lift the communication antennas.
Glider Navigation Principles Diving Step 1. On surface the glider empty the air bladder. Empty Step 2. The glider fill the ballast pump (233 cm3) and uses the pitch batteries to compensate the diving angle and the fin to navigate. The glider has changed his center of gravity and center of buoyancy to dive. Moves the fin to control the orientation. The flaps give him Lift and Drag to move forward. Standard diving angle: 26º
Glider Navigation Principles Climbing The glider empty the ballast pump and uses the pitch batteries to compensate the climbing angle. The flaps give him Lift and Drag to move forward. Moves the fin to control the orientation. The glider has changed his center of gravity and center of buoyancy to climb. Standard climbing angle: 26º
Glider Navigation Orientation Uses Dead Reckoning Navigation Control: Underwater Behaviour: - Don’t have GPS - Don’t know real currents - Uses Compass and Depth sensors to estimate current position - Uses last transect measured currents to control orientation Surface Behaviour: - Takes a new GPS position - Measures deviation to desired position - Measures a new current estimation - Establishes a new Iridium call Obtained position Desired position
Glider Mission Transects • Makes inflections to 200 meter depth: • - Uses an altimeter to measure the seafloor • distance an makes an inflection 15 meters • earlier (configured value). • When climbs makes an inflection at 15 • meters depht to avoid collisions • (configured value). 15m Climbs to surface every 6h (configured time) to fix a new GPS position or when reaches a mission Waypoint and sends the data measured using Iridium.
Glider Launch Glider cart is used to launch the glider in order to do not damage it. Special care must be taken with wings and sensors.
Missions Balearic Sea:a sustained observational programme • Objetives: • Balearic CurrentVariability • Demostration • Improvement coastal altimetry
Missions Balearic Sea:a sustained observational programme 5 1 2 3 4
Mission July 2007 – Glider/Ship Glider- July 2007 Ship - July 2007 Temp Salinity Density
Balearic Sea missions : July/Sept 2007 Glider- July 2007 Glider- Sept 2007 Temp Salinity Density
Glider vs altimetry (4 first samplings) Rms diff = 0.53 cm Std gli = 2.65 cm Rms diff = 0.83 cm Std gli = 1.44 cm Rms diff = 1.24 cm Std gli = 1.48 cm Rms diff = 0.50 cm Std gli = 0.55 cm
Balearic Sea Mission: April 2008 Anticyclonic eddy in the Balearic Sea sampled by the coastal glider.
April mission: real time results • Envisat data reveals: • intense anticyclonic circulation (7 cm amplitude and 80 km diameter). • absence of Balearic front. • Glider data reveals: • moderated anticyclonic signature. • strong gradient near the coast corresponding to the Balearic front. Rms diff = 1.96 cm Std gli = 1.18 cm
April mission: real time results BEFORE CORRECTION AFTER CORRECTION
Glider in Antarctica Rutgers University
Gliders: A key component of the observational and prediction operational system in the Western Mediterranean Sea http://www.imedea.uib.es/natural/goi/goifis/OPERACIONAL/