Download
1 / 19
190 likes | 280 Views
Optimizing Slow Traffic Ahead Alert Model Based On Empirical Data. Michael Seelhorst , Shahram Rezaei , Ching-Yao Chan , James Misener , Raja Sengupta ITSA Annual Meeting Interactive Session 2 4 May, 2010. Agenda. Motivation and Concept Testing Area SF Bay Area Freeway Network Experiment

E N D
Optimizing Slow Traffic Ahead Alert Model Based On Empirical Data Michael Seelhorst , Shahram Rezaei , Ching-Yao Chan , James Misener , Raja Sengupta ITSA Annual Meeting Interactive Session 2 4 May, 2010
Agenda • Motivation and Concept • Testing Area • SF Bay Area Freeway Network • Experiment • Conclusions • Last Words: Reconstituted Program
Safety Situational Awareness is Key
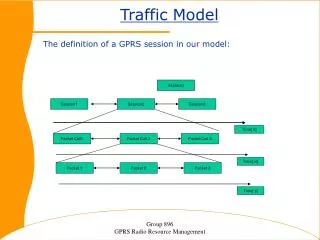
Application Architecture NT Server Cellular Phone 3rd Party Services NT Safety Service Phone GPS Sensor Speed Info Data Feeds Speed Info Sensor Service Traffic.com Data Feed Phone 3G Radio Traffic.com Service NAVStreets NT Client Application NAVStreets Service MAP24 Routing Engine Non-recurrent Congestion NT Website User Data (GPS Traces, Alerts)
Situational AwarenessConcept of Advisory Services Mapping to the Classic Driving Model Taxonomy • Strategic • Safety Route Advisory • Tactical (Primary Focus) • Situational Awareness Advisory • Control • “Watch out for me!” Active Safety Active Safety Situational Awareness Trip Advisory < 1 sec. Alert Latency 10-60 sec. 2-30 minutes.
Situational Awareness Advisory1 of 2 • Potential Site: I-280 / SR-17 • More Lane Change / Improper Turns • High Speed Crashes During Peak Hours I-880 & SR-17
Situational Awareness Advisory2 of 2 • Potential Site: US-101, Left (Median) Lane, Postmiles 15 – 20
End of Queue Freeway Problem • From Florida DOT (2004 – 2006 Data / 73,910 crashes / nearly 100,000,000 VMT) • I-95: 66% of crashes • I-75: 49% of crashes • I-10: 45% of crashes • I-4: 70% of crashes • Composite: 59% of crashes • From California (SWITRS / 1997 – 2007 / Fatality and injury crashes only) • US 101 (San Francisco): 17% of crashes • US 101 (San Mateo): 24% of crashes • US 101 (Santa Clara): 21% of crashes • I-880 (Alameda): 27% of crashes • I-680 (Contra Costa): 21% of crashes
Coverage Map (1/2): About 1650 NAVTEQ triggers and more than 520 SpeedInfo triggers in Bay Area.
Alert Algorithm • Definitions: Subject vehicle: Vehicle whose driver receives slow traffic ahead alert Alert location: Upstream location where traffic is slow Trigger location: Represented by GPS lat, long, and heading; about one mile (60 seconds of free flow speed) before the alert location • Suppose: • Vs = Speed of the subject vehicle • Vf = Speed of the vehicles at the alert location • Alert is issued if: • Vf ≤ 50 mph and • Vs – Vf ≥ 15 mph and • Distance between trigger location and subject vehicle location ≤ 500 ft • Difference between trigger location’s heading and vehicle’s heading ≤ 50 deg
Analysis and Results Data Total User IDs observed = 14 Deployed the S-Curve functionality on the client in October 18 trips, 7 users Assuming trigger point to be a fixed bench mark Drivers slowed down 53 sec on average after traversing the trigger point before the S-Curve functionality was deployed Drivers slowed down 27 sec on average after traversing the trigger point after the S-Curve functionality was deployed Average speed at trigger point was 51 mph; slowed down = drop of 15 mph in speed Summary On average, drivers slowed down 280 m before S-Curve before deploying the S-Curve functionality On average, drivers slowed down 450 m before the S-Curve after deploying the S-Curve functionality
Smart Phone Message Set Application of Ordinary Least Squares Regression Analysis • Time (s) • Latitude (deg) • Longitude (deg) • Speed (mph) • Heading angle (deg) • Altitude (m) • Number of satellites • PDOP (Position Dilution Of Precision) 7 drivers, 3000 miles of late summer, early fall “shakedown” testing
Modeled Slowing Distances Between Two Drivers
Conclusions • Situational awareness alerts elicit different responses between drivers • Generally internally consistent – and therefore effective? • No one-size fits all? • “Smart” (learning) awareness alert possible? • Behaviors seem lasting
Last Notes: Revised Project, Congestion Ahead Alert • Hypothesis: an audio “situational awareness” alert could yield safety benefits • Reuse congestion ahead algorithm and concepts but don’t use mobile phones • GPS, mobile phones (or computer/GPS surrogate) • Instrument four vehicles: access CAN bus, GPS, forward looking radar • Limited tests with naïve drivers to assess driver performance • Surrogates: objective (speed, use of primary controls, car following behavior ), TBD (head abduction), subjective (interviews, questionnaires)