Download
1 / 1
10 likes | 85 Views
Intermittent control : past and present data about the vehicle, and the future data about the road were captured and actualized every W seconds. Information allowable to calculate the command. J. Next steering command. Time (s). Past t d W L delay Intermittence Preview.

E N D
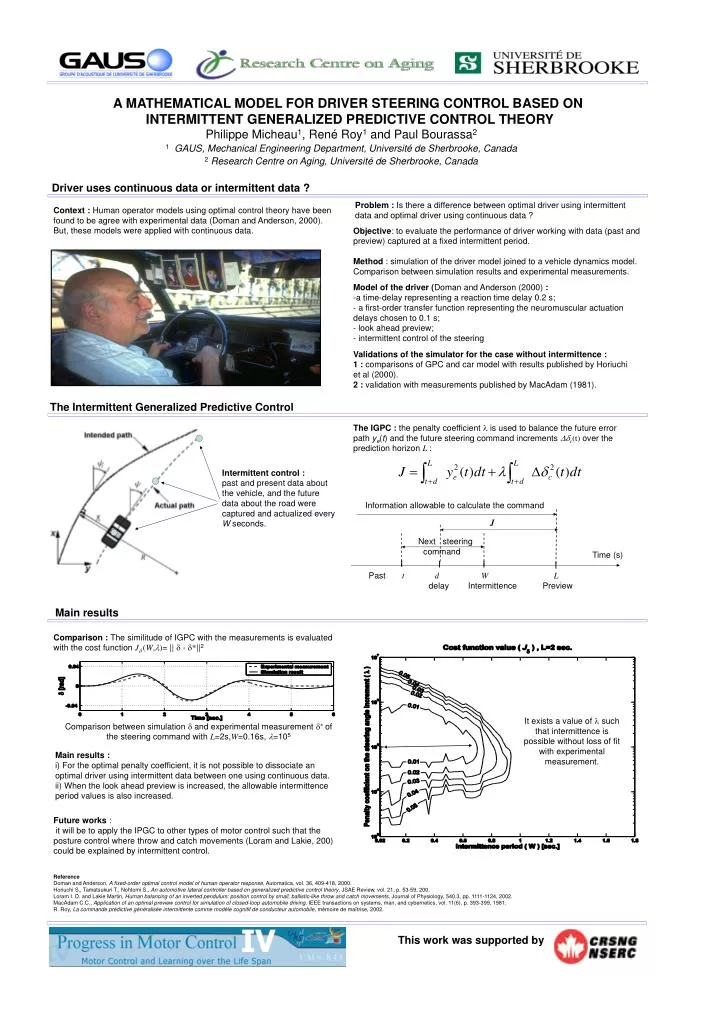
Intermittent control : past and present data about the vehicle, and the future data about the road were captured and actualized every W seconds. Information allowable to calculate the command J Next steering command Time (s) Past tdWL delayIntermittence Preview UNIVERSITÉ DE A MATHEMATICAL MODEL FOR DRIVER STEERING CONTROL BASED ON INTERMITTENT GENERALIZED PREDICTIVE CONTROL THEORY Driver uses continuous data or intermittent data ? Problem : Is there a difference between optimal driver using intermittent data and optimal driver using continuous data ? Context : Human operator models using optimal control theory have been found to be agree with experimental data (Doman and Anderson, 2000). But, these models were applied with continuous data. Objective: to evaluate the performance of driver working with data (past and preview) captured at a fixed intermittent period. Method : simulation of the driver model joined to a vehicle dynamics model. Comparison between simulation results and experimental measurements. • Model of the driver (Doman and Anderson (2000) : • a time-delay representing a reaction time delay 0.2 s; • a first-order transfer function representing the neuromuscular actuation delays chosen to 0.1 s; • look ahead preview; • intermittent control of the steering Validations of the simulator for the case without intermittence : 1 : comparisons of GPC and car model with results published by Horiuchi et al (2000). 2 : validation with measurements published by MacAdam (1981). The Intermittent Generalized Predictive Control The IGPC : the penalty coefficient l is used to balance the future error path ye(t) and the future steering command increments Ddc(t) over the prediction horizon L : Philippe Micheau1, René Roy1 and Paul Bourassa2 1 GAUS, Mechanical Engineering Department, Université de Sherbrooke, Canada 2 Research Centre on Aging, Université de Sherbrooke, Canada Main results Comparison : The similitude of IGPC with the measurements is evaluated with the cost function Jd (W,l)= || d - d*||2 It exists a value of l such that intermittence is possible without loss of fit with experimental measurement. Comparison between simulation d and experimental measurement d*of the steering command with L=2s,W=0.16s, l=105 Main results : i) For the optimal penalty coefficient, it is not possible to dissociate an optimal driver using intermittent data between one using continuous data. ii) When the look ahead preview is increased, the allowable intermittence period values is also increased. Future works : it will be to apply the IPGC to other types of motor control such that the posture control where throw and catch movements (Loram and Lakie, 200) could be explained by intermittent control. Reference Doman and Anderson, A fixed-order optimal control model of human operator response, Automatica, vol. 36, 409-418, 2000. Horiuchi S., Tamatsukuri T., Nohtomi S., An automotive lateral controller based on generalized predictive control theory, JSAE Review, vol. 21, p. 53-59, 200. Loram I. D. and Lakie Martin, Human balancing of an inverted pendulum: position control by small, ballistic-like throw and catch movements, Journal of Physiology, 540.3, pp. 1111-1124, 2002. MacAdam C.C., Application of an optimal preview control for simulation of closed-loop automobile driving, IEEE transactions on systems, man, and cybernetics, vol. 11(6), p. 393-399, 1981. R. Roy, La commande prédictive généralisée intermittente comme modèle cognitif de conducteur automobile, mémoire de maîtrise, 2002. This work was supported by