Download
1 / 123
1.31k likes | 1.88k Views
Fundamentos Drives. Índice. Introducción a los Drives Fundamentos Controles CD Fundamentos Drives CA Motores de Inducción CA Regeneración con Drives CA Sección de Aplicaciones Armónicos y Drives CA Multi -pulso. Introducción a los tipos de Drives: CD, CA & Servo Drives.

E N D
Fundamentos Drives
Índice Introducción a los Drives Fundamentos Controles CD Fundamentos Drives CA Motores de Inducción CA Regeneración con Drives CA Sección de Aplicaciones Armónicos y Drives CA Multi-pulso
Modelo Hidráulico Modelo Eléctrico • Presión (PSI) • Voltaje (Volts) • Flujo (gal./min.) • Corriente (Amps) • Resistencia • Resistencia (Ohms) Analogías Hidráulica y Eléctrica
AC Drive Que es un “Drive”? En el mundo eléctrico, “drive” es un termino usado para describir un controlador para motor de velocidad variable. Los diferentes tipos de “drives” pueden controlar motores de CA, motores de CD y servomotores Tipos de Drives Retro. Velocidad CA-CD CD - controla la velocidad & par de un motor de CD con un puente rectificador controlado CA – controla la velocidad y par de un motor de CA por convertir CA a CD, y entonces de vuelta a CA SERVO – controla velocidad, par & movimiento o posición de un servomotor “brushless” DC Drive Retro. Velocidad CA-CD-CA Retro. Posición CA-CD-CA Servo Drive
Fundamentos Drives de CD A1 CD Armadura A2 F1 DRIVE Campo F2 SALIDA AL MOTOR LÍNEA ENTRADA Los Drives de CD convierten el voltaje de línea de CA en voltaje variable de CD con un puente rectificador de fase controlada (SCR), para alimentar la ARMADURA del motor de CD. Una fuente separada suministra al motor la excitación al CAMPO de CD
Dentro del Motor CD (ShuntFieldDesign) F1 F2 A1 A2 El conmutador y escobillas mantienen el flujo de armadura en una posición fija relativa al campo, lo que garantiza que la fuerza del par es siempre perpendicular al campo de magnetización. CAMPO N ARMADURA S
% T % IDC Curvas Típicas de Corriente y Par Motor CD 200 La corriente de Armadura es directamente proporcional al par a través del rango de carga. MOTORIZANDO 100 NO LOAD RPM 0 REGENERANDO -100 -200
2 : 1 CAMPO DEBILITADO 3 : 1 CAMPO DEBILITADO Motor CD Par & HP vs. Velocidad Placa de Motor: 250 / 1000 RPM CAMPO NOMINAL CAMPO DEBILITADO RANGO 4 : 1 % PAR CONSTANTE POTENCIA CONSTANTE 100 75 PAR & POTENCIA PAR @ 100% ARMADURA AMPS POTENCIA 50 25 4 : 1 CAMPO DEBILITADO 750 500 1000 250 Max. Velocidad Base VELOCIDAD (RPM)
CÁTODO ÁNODO COMPUERTA Power Switches El SCR: (Rectificador Controlado de Silicio) a.k.a. - “Tiristor” - DISPARO + • Interruptor de estado solido extremadamente robusto / 40+ años de trayectoria probada • Elemento clave en los circuitos de potencia de Drives de CD • Un simple pulso activa el flujo de corriente • El dispositivo tiene autoapagado cuando se polariza inversamente • Encapsulados tipos paquete 2-, 4- y 6- disponibles en ciertos tamaños y rangos.
Problemas de Aplicación: Cortes en la Línea de CA con Drives CD Entrada CA Los cortes por conmutación son causados por la transferencia de corriente desde un SCR hacia otro. Estos cortes pueden causar fallos de disparo en drives comunes a la misma línea de energía. V ph-ph Solución: Instalación de un pequeño reactor (25-50 uH rango), 3-fases sobre cada controlador de CD puede prevenir “cross-talk” y otros problemas relacionados.
Señales Disparo SCR Señales control campo Elementos Drive de CD: Tipo No-regenerativo A1 F1 Entrada CA Retroalimentación por Tacómetro (lazo cerrado) F2 A2 Retroalimentación voltaje de motor Retroalimentación corriente de linea Microprocesador controlador Referencia Velocidad ó Par Interface Operador
R R R F F F R R R F F F AC MOTOR DRIVE 0.75 KW 200 V v 1.3 HEALTH LOCAL REF SEQ E PROG L M R FWD JOG REV RUN STOP RESET RESET Interface Operador Elementos Drive de CD: Tipo Regenerativo A1 Entrada CA F1 Retroalimentación por Tacometro (Lazo Cerrado) F2 A2 Señales Control Campo Señales Disparo SCR Retroalimentación Voltaje de Motor FWD/MOT REGEN/REV Retroalimentación Corriente de Linea Microprocessor controller Referencia Par ó Velocidad
Frenado Dinámico en Drives CD M A1 M F1 Potencia de Frenado DBR F2 A2 Tiempo M • Las Resistencias de Frenado Dinámico están derivadas a través de la armadura de motor en modo de STOP ó E-STOP. • Motor FCEM (voltaje de regreso desde el motor, actuando como generador) aparece a través de la red de resistencias. • El voltaje disminuye a medida que las resistencias disipan la energía. • La potencia de frenado disminuye exponencialmente con la desaceleración del motor: P = V2/R No es a prueba de fallos: El FD no funcionará si el suministro de campo está ausente (es decir - si se pierde la energía)
AHORRO DE ENERGÍA Retrofit conjunto M-G GENERADOR CD MOTOR CD MOTOR CA CARGA 90% eficiencia 90% eficiencia .80 pf 20A 20A 400HP Armature 5% pérdida 5% pérdida 88% eficiencia Regulador Campo Motor Regulador Campo Generador Control Eficiencia Total = (.88 x .90 x .95 x .90 x .95) x 100 = 64% Pérdida de Potencia = .36 x 400 x .746 kW/Hp = 107 kW Pérdida Anual de Potencia = 107 kW x .10 $/kWH x 365 x 24hr/día = $93,732
AHORRO DE ENERGÍA Retrofit conjunto M-G DRIVE CD MOTOR CD CARGA 90% eficiencia 20A Armadura CAMPO EficienciaTotal = (.98 x .90) x 100 = 89%
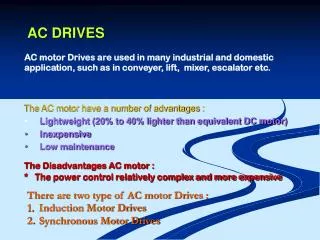
AC DRIVE Fundamentos Drives de CA SALIDA MOTOR LÍNEA ENTRADA Todos los Drives de CA convierten un voltaje y frecuencia “fijos” hacia voltaje y frecuencia “variables”, para operar motores de inducción 3 fases
Tipos de Drives CA • En el mercado actual, hay 3 categorías básicas de Drives de CA: • Drives Lazo Abierto “Volts / Hz” • Drives Lazo Abierto “Sensorless Vector” • Drives de Lazo cerrado “Flux Vector” • Todos son Modulación por Ancho de Pulso (PWM) • Algunos fabricantes ofrecen 2 en 1 & 3 en 1, combinando estos atributos. V/Hz SENSOR- LESS VECTOR FLUX VECTOR
SENSORLESS? VOLTS / HZ? DRIVES CA: • Los precios en CA continúan cayendo • Más 2- & 3-en-uno* productos introducidos *(Productos combinados Volts/Hz, Vector, and Sensorless Vector) • Confusión del Distribuidor, OEM & Usuario sobre que usar • Usuarios buscan algo SIMPLE , inclusive en altos HP. CLOSED LOOP? VECTOR? Los SSD 690+ Series AC Drives combinan todos esos atributos en un solo producto – haciendo la decisión fácil para nuestros clientes FLUX VECTOR?
Drives de Lazo Abierto“Volts / Hz” Volts 460 Placa Motor V/Hz 230 Refuerzo de Par Hz 0 30 60 1800 (Base) 900 RPM* *( motor 4-polos) • El voltaje de motor es variado linealmente con la frecuencia • Sin compensación para las dinámicas del motor y la carga • Pobre respuesta a impactos de carga
Drives Sensorless & Flux Vector Volts 460 Placa Motor V/Hz 230 Hz 0 30 60 1800 (Base) 900 RPM* *( motor 4 polos) • El voltaje de Motor es variado linealmente con la frecuencia, con autoajustes dinámicos • Compensación dinámica V/Hz para la carga y el motor • Excelentes características de respuesta a impactos de la carga y alto par de arranque
Motor de CA, Par & HP vs. Velocidad Par 100 % T & HP HP 50 0 30 60 Hz 1800 RPM 900 • El Par Motor es constante a la velocidad base • Los HP’s varian proporcionalmente con la velocidad
Inversor Modulación Ancho de Pulso Circuito de Potencia Básico CA a CD Rectificador CD a CA Inversor Filtro CD Salida CD Caps Bus CD Entrada CA IGBTs M Todos los inversores PWM (V/Hz, Vector & Sensorless Vector) comparten similares topologías del circuito de potencia. La CA es convertida a CD, filtrada é invertida hacia frecuencia y voltaje variable de CA
PWM Circuito de Potencia: Sección Convertidor CA a CD CA a CD Rectificador Filtro CD Entrada CA Caps Bus CD + - Reactor de Entrada (opción) Reactor CD • La entrada de CA es rectificada y filtrada a voltaje fijo CD • Ciertas unidades contienen un reactor de CD (bobina) como parte integral del filtro de CD. • La adición de un reactor de entrada externo ofrece beneficios similares. • Ambos reducen armónicos, suavizan y bajan la corriente pico.
INTERRUPTOR Interruptores de Potencia El IGBT: (Insulated Gate Bipolar Transistor) Un IGBT es hibrido entre un MOSFET y un Transistor Bi-polar Darlington COLECTOR = COMPUERTA EMISOR • Un IGBT puede conmutar desde “OFF” a “ON” en menos de un microsegundo. • Amplifica las señales lógicas del drive la COMPUERTA de alta impedancia. • Asuntos de Aplicación : • Un cambio de estado de 1 microsegundo genera un pulso de RF de 1 MHz. • El dv/dt (rápidos cambios de voltaje) pueden estresar los sistemas de aislamiento del motor.
PWM Circuito de Potencia: CD a CA Sección de Inversión Vu-v CD a CA Inversor Filtro CD Salida CA + U IGBTs M V - W Imotor Señales Disparo IGBT Un IGBT (InsulatedGate Bipolar Transistor) es un interruptor semiconductor de potencia de alta velocidad Los IGBTs son modulados en ancho de pulso con un patrón especifico de disparos, cortando el voltaje de CD en voltaje de CA trifásico con la frecuencia y voltaje apropiado. La corriente de motor resultante es cercana a la senoidal, debido a la inductancia del motor
IGBT Problemas de Conmutación SOLUCIÓN RESULTADO CONDICIÓN Reactor de salida instalado cerca del controlador Molestas fallas por el acoplamiento capacitivo a tierra Longitud cable del controlador-al-motor > 38m Reactor de salida; Mejorar el aislamiento del motor Fallas molestas; Daños aislamiento motor por el voltaje doblado Fenómeno de onda reflejada Mayor conmutación o algoritmo “tranquilo” Frec. Conmutación rango de 2 a 10Khz Ruido acústico motor Daños aislamiento motor por el voltaje doblado Mejorar el aislamiento del moto Alto dV/dT por rápida conmutación Filtro RFI / EMI de entrada, cable de motor apantallado, conductor de tierra separado Interferencia con equipos de telecomunicación R.F. & Interferencia electromagnética
V f Señales Disparo IGBT Circuito de Control Básico V/HZ: Señales de Entrada, Retro y Control Retroalimentación corriente & voltaje Bus CD Retroalimentación corriente & voltaje Motor Interface Operador PWM microprocesador controlador Referencia Vel.
IGBT Gating Signals Elementos de Control Flux Vector Señales Entrada, Retro y Control Encoder Retroalimentación Retroalimentación corriente & voltaje Motor Retroalimentación voltaje Bus CD Interfase Hombre-Maquina PWM microprocesador controlador con Algoritmo Vector Referencia de Velocidad y/o Par
LAZOS DE CONTROL AC VECTOR AC Vector Drive Encoder Lazo Velocidad Lazo Par Error Velocidad Ref. Par PWM Disparo Referencia Velocidad Regulador Par Regulador Velocidad Referencia Par Frec. & Voltaje Referencia Par Actual Par Calculador Retroalimentación Frecuencia Retroalimentación Velocidad
Motor de Inducción Típico CA Curva Velocidad / Par Operación “Directo a Línea” @ 60 Hz, NEMA ‘B’ motor Punto de ruptura: El máximo par motor se produce antes del bloqueo del rotor 225 Par Arranque %T 175 Par de Tracción Punto de operación a plena carga (100% corriente & par) 1750 RPM (placa) 150 100 CARGA Velocidad sincronía “sin carga” 1800 RPM Velocidad (50 rpm) DESLIZAMIENTO
Familia de curvas velocidad/par motor sobre un inversor 225 Velocidad base Motor: 1750 RPM Par Pico Inversor (150 -200%) %T 175 150 100 100% par de la carga línea de operación Desl. (50 rpm) Desl. (50 rpm) Velocidad A cualquier frecuencia aplicada, un motor de inducción se desliza a unos RPM fijos a la carga nominal
120 x Frecuencia Número de Polos SINC RPM = Ejemplo: motor de 4 polos SINC RPM = 120 x 60 / 4 polos = 1800 RPM SINC RPM – RPM PLENA CARGA SINC RPM %DES = X 100 Ejemplo: 1750 RPM motor % Des = (1800 - 1750) / 1800 x 100 = 3% Des Referencia: FORMULAS MOTOR AC VELOCIDAD SÍNCRONA Relación: VOLTS / HERTZ Voltaje Motor Frecuencia Motor V/Hz = Ejemplo: 460 V, 60 Hz motor V/Hz = 460/60 = 7.66 V/Hz DESLIZAMIENTO MOTOR VOLTSFRECUENCIAV/Hz 460 60 7.66 345 45 7.66 230 30 7.66 115 15 7.66 7.66 1 7.66
TAMAÑO DE MOTOR CA El tamaño del armazón esta directamente relacionado a los RPM base, para una potencia determinada Ejemplo: motores de 15 HP de diferentes velocidades base 15 HP 15 HP 15 HP 1200 (6-polos) 284 67.5 lb-ft 19.3 1800 (4-polos) 254 45 lb-ft 18.7 3600 (2-polos) 215 22.5 lb-ft 18.5 RPM Base Tamaño Par Amps
Como la compensación de deslizamiento mejora la regulación de velocidad Ejemplo: Motor con carga a 30 Hz DESPUÉS ANTES Nueva curva 31.7 Hz Curva 30 Hz 175 175 Punto de operación a plena carga 30 Hz (100% corriente & par) 850 RPM %T %T 150 900 RPM 150 100 100 Velocidad de Sinc. “sin carga” a 30 Hz 900 RPM 950 RPM Velocidad Velocidad Desl. (50 rpm) Desl. (50 rpm) Por medir la corriente y otras variables, la Comp. Desl. aplicara 31.7 Hz al motor, restaurando la velocidad a 900 RPM. Un motor perderá 50 rpm bajo plena carga con 30 Hz de frecuencia aplicada, deslizando desde 900 a 850 rpm.
Ventajas del Motor de Inducción • Bajo costo (comparado con CD) • Amplia disponibilidad • Bajo mantenimiento – sin escobillas ó conmutador • Diseño robusto – puede ser usado en ambientes agresivos • Diseños de rotor de baja inercia • Alta eficiencia eléctrica • Amplios rangos de velocidad • Solo devanados de campo alimentados • Buen desempeño en lazo abierto
Elementos de un Motor de Inducción: El Rotor No hay conexiones eléctricas directas hacia el rotor. Todas las fuerzas son magnéticamente inducidas por el estator, vía el espacio de aire. Corriente en Barra Rotor Barras de aluminio fundido del rotor Llevan corriente inducida (Barras sesgadas mostradas) Anillos de aluminio fundido Laminaciones de acero y alto contenido de silicón Une eléctricamente las barras del rotor en ambos extremos Baja-media corriente Eddy, y pérdidas magnéticas
Elementos de un Motor de Inducción: El Estator Núcleo del Estator Laminación de placas de acero con cortes
Elementos de un Motor de Inducción: Bobinados del Estator (4-polos) Laminaciones de acero Ranuras Estrella o Delta tipos de conexión Bobinas Estator
t Elementos de un Motor de Inducción: Bobinados del Estator (4-polos) Campo magnético giratorio El estator induce líneas magnéticas de flujo a través del entrehierro, en el rotor
Deslizamiento del motor de inducción DES = (ws - wr ) / ws westator wrotor • El deslizamiento del motor es proporcional al par de la carga. • La velocidad del estator es conocida por la frecuencia • La velocidad del rotor es medida con un encoder (Vector). • La velocidad del Rotor puede ser aproximada, conociendo la corriente del motor y del bus (Sensorless Vector algoritmo)
Dinámica del Campo Magnético del Rotor: El DESLIZAMIENTO crea PAR Cuando la velocidad del rotor se encuentra cerca de la velocidad del estator (carga ligera), pocas líneas de flujo del estator se cortan. La corriente de la barra del rotor y la frecuencia de deslizamiento son bajos. Líneas de Flujo Magnético Corriente en Barra Rotor Líneas de Flujo Magnético Líneas de Flujo Magnético Carga Pesada Carga Ligera A medida que el rotor se desliza, el deslizamiento de la frecuencia de la corriente en la barra del rotor se incrementa, resultando en una mayor intensidad del campo del rotor (más par).
Motor de Inducción Circuito Equivalente Entrehierro Rotor Estator Resistencia Estator Reactancia de Fuga Reactancia Rotor R1 XLR XR V XM RLOAD = R2 / Des* Reactancia de Magnetización *(R2 es la resistencia de la barra del rotor) Aunque no existe una conexión física entre el rotor y el estator, el campo inducido hace que el modelo de motor se comporte como si existiera