Download
1 / 36
360 likes | 518 Views
Global Clock Synchronization in Sensor Networks. Qun Li, Member, IEEE, and Daniela Rus, Member, IEEE. IEEE Transactions on Computers 2006. Chien-Ku Lai. Outline. Introduction The Synchronization Problem All-Node-Based Synchronization Cluster-Based Synchronization Synchronous Diffusion

E N D
Global Clock Synchronizationin Sensor Networks Qun Li, Member, IEEE, and Daniela Rus, Member, IEEE IEEE Transactions on Computers 2006 Chien-Ku Lai
Outline • Introduction • The Synchronization Problem • All-Node-Based Synchronization • Cluster-Based Synchronization • Synchronous Diffusion • The Asynchronous Diffusion Methods • Simulation • Conclusion
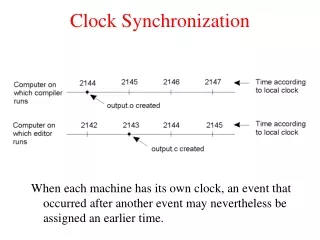
Introduction- Clock Synchronization • Many emerging sensor network applications require that the sensors in the network agree on the time • Ex. a vehicle tracking application
Introduction- Clock Synchronization (cont.) • Clock synchronization has been a seminal topic in distributed systems • But it’s not easy to extend these results in the context of a sensor network • all the nodes in a network can communicate directly with each other
Introduction- About this paper • Four new methods for global synchronization • The all-node-based method • The cluster-based method • The fully localized diffusion-based method • The fault-tolerant diffusion-based method • This paper aims to provide coarse synchronization
The Synchronization Problem • The time of a computer clock is measured as a function of the hardware oscillator
The Synchronization Problem (cont.) • The clocks in a sensor network can be inconsistent due to • The clock may drift due to environment changes • Temperature • Pressure • Battery voltage • The nodes in a sensor network may not be synchronized well initially • The clock can also be affected by the interaction of other components of the sensor system • The Berkeley Mica Mote sensors
The Synchronization Problem- Assumptions • The hardware clock is not precise • Nodes can read the current clock time and adjust the clock time at any time • The sensor cannot determine the time elapsed in between the two ticks
All-Node-Based Synchronization- Assumptions • This method is used on all the nodes in the system • It is most effective when the size of the sensor network is relatively small • The clock cycle on each node is the same • The clock tick time is much longer than the packet transmission time • The message transmission time over each link and handling time on each node is roughly the same
All-Node-Based Synchronization- The Key Idea • Send a message along a loop and record the initial time and the end time of the message • Average the time to different segments of the loop and smooth over the error of the clocks
All-Node-Based Synchronization- Example A clock synchronization message traveling along a loop originated from node n1 and then back to node n1
All-Node-Based Synchronization- Algorithm is the minimal number of nodes synchronized in each synchronization round (excluding the reference node)
All-Node-Based Synchronization- Example (cont.) ts = 1 te = 1 ti = 3 t = 3 1 2 3 1
All-Node-Based Synchronization- Example (cont.) ts = 1 te = 1 ti = 3 t = 3 t = 1 1 2 0 1 0 3 – 3 + 1 + 0 = 1
Synchronous Diffusion Why Use Diffusion? The Rate-Based Synchronous Diffusion Algorithm
Why Use Diffusion? • The previous methods • use global time information sent to all the nodes • are not scalable for very large networks • are not fault-tolerant
Why Use Diffusion? (cont.) • The diffusion method is fully distributed and localized • Synchronization is done locally • without a global synchronization initiator • The diffusion synchronization method can be viewed as a high level framework for global synchronization
Why Use Diffusion?- The main idea • Average all the clock time readings and set each clock to the average time • A node with high clock time reading diffuses that time value to its neighbors and levels down its clock time • A node with low time reading absorbs some of the values from its neighbors and increases its value
Why Use Diffusion?- Assumptions • Two basic operations: • The neighboring nodes compare their clock readings at a certain time point • The nodes change their clock accordingly • It may be a problem because • The clock comparison and the clock update cannot be done simultaneously
is the clock reading for sensor ni at time t (for simplicity, use ci) The Rate-Based Synchronous Diffusion Algorithm- Assumptions • There are n sensors in the system • This network is represented as a graph • Let contain the time readings of the sensors in the network at time t T denotes matrix or vector transposition
is the diffusion rate The Rate-Based Synchronous Diffusion Algorithm- Algorithm
The Rate-Based Synchronous Diffusion Algorithm- Example C1:2 C1:3.1 1 1 0.1 0.1 0.2 0.2 2 3 2 3 0.2 0.2 C2:5 C3:7 C2:4.4 C3:6.5
The Asynchronous Diffusion Methods Asynchronous Diffusion Algorithms Discussion
Asynchronous Diffusion Algorithms • The average operation is atomic • If a node is involved in two or more average operations, these operations must be sequenced
Discussion • The local synchronization is more important than the precise global synchronization • Each node can run the asynchronous operations on the fly without knowing what other nodes are doing • Changing network topology • Node failure • Adverse communication conditions • Node mobility
Simulation The relative error The convergence speed
The relative error Number of nodes 200 Sensor field 10x10 Transmission range 1.5 Algorithm stop error 0.01 percent
The convergence speed (1/4) Sensor field 10x10 Transmission range 1.5 Algorithm stop error 0.01 percent
The convergence speed (2/4) Sensor field 10x10 Number of nodes 1,000 Algorithm stops at error 0.01 percent
The convergence speed (3/4) Sensor field proportional to the number of nodes (10 nodes per unit area) Transmission range 0.7 Algorithm stops at error 0.1 percent
The convergence speed (4/4) Number of nodes 400 Sensor field 15x15 Transmission range 1.5
Conclusion • The global synchronization problem in sensor networks is considered • The all-node-based method • The cluster-based method • The diffusion-based methods • The fault-tolerant diffusion-based method • Two implementations of the clock diffusion: • Synchronous • Asynchronous
Conclusion- Future Work • The proposed algorithms can be extended to other sensor network applications • Data aggregation • The authors are currently examining how the methods presented here fit to more general applications • The future work also includes implementing the algorithms in a real sensor network using the Mica Mote sensor network platform
Questions? Thank you.