Our approach
10 likes | 160 Views
Axial Moving Lines and Singularities of Rational Planar Curves. Ning Song, Ron Goldman, Falai Chen {nsong, rng@rice.edu, falai@ustc.edu.cn}. Introduction - Singularities. What are u-Bases?. Theorems. Singularities is important in Geometry Modeling

Our approach
E N D
Presentation Transcript
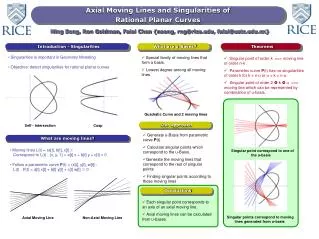
Axial Moving Lines and Singularities of Rational Planar Curves Ning Song, Ron Goldman, Falai Chen {nsong, rng@rice.edu, falai@ustc.edu.cn} Introduction - Singularities What are u-Bases? Theorems • Singularities is important in Geometry Modeling • Objective: detect singularities for rational planar curves • Special family of moving lines that form a basis. • Lowest degree among all moving lines • Singular point of order k <=> moving line of order n-k . • Parametric curve P(t) has no singularities of order k for k > n-u or u < k < n-u. • Singular point of order 2 k u <=> moving line which can be represented by combination of u-basis. Quadratic Curve and 2 moving lines Our approach Self - Intersection Cusp • Generate u-Basis from parametric curve P(t). • Calculate singular points which correspond to the u-Basis. • Generate the moving lines that correspond to the rest of singular points • Finding singular points according to those moving lines What are moving lines? • Moving lines L(t) = (a[t], b[t], c[t] ): • Correspond to L(t) . {x, y, 1} = a[t] x + b[t] y + c[t] = 0 • Follow a parametric curve P(t) = (x[t], y[t], w[t]): • L(t) . P(t) = a[t] x[t] + b[t] y[t] + c[t] w[t] 0 Singular point correspond to one of the u-basis Conclusions • Each singular point corresponds to an axis of an axial moving line. • Axial moving lines can be calculated from u-bases. Singular points correspond to moving lines generated from u-basis Axial Moving Line Non-Axial Moving Line