Download
1 / 11
110 likes | 434 Views
Vettori. Finche ’ il moto si svolge in una sola dimensione – moto unidimensionale , moto rettilineo – non abbiamo bisogno di vettori La posizione e’ individuata dato il sistema di riferimento , e cosi ’ pure tutte le altre grandezze del moto .

E N D
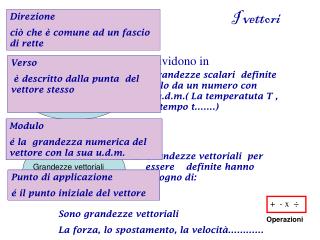
Vettori • Finche’ ilmotosisvolge in una sola dimensione – motounidimensionale, motorettilineo– non abbiamobisognodivettori • La posizione e’ individuatadatoilsistemadiriferimento, e cosi’ pure tutte le altregrandezze del moto. • Posizione, velocita’ e accelerazionesono individuate danumeri con un segno, cheindicamisura (grandezza), direzione (lungo la retta del sistemadiriferimento) e verso (positivo se in direzionedellafreccia del sistemadiriferimento, negativo se in direzioneopposta). • Quandoilmotosisvolge in piu’ dimensioni – due o tre, fisicamenteparlando – occorre un modo per specificareposizione, velocita’ e accelerazione, e specificarnegrandezza, direzione e verso. • L’usodeivettoriconsentedidescriverefacilmentegrandezzefisichecaratterizzatedamisura – grandezza – direzione e verso.
Sistemadiriferimentocartesiano • Come nelcaso del motounidimensionale, la prima cosa e’ avere un sistemadiriferimento • Unapossibilita’ e’ scegliere un sistemadiriferimentocartesiano, compostodatreassiperpendicolaritradiloro • Non e’ l’unicascelta, edinfattivedremoaltrisistemidiriferimento – cilindrico, sferico… • Ogniasse ha ilsuo verso, la suadirezione e la suaunita’ dimisura • L’origine O e’ data dalpuntodicongiunzionedegliassi • Gliassi del sistemadiriferimentosonoconvenzionalmentechiamati “x”, “y”, “z” e sonoconvenzionalmenteordinati (costituisconouna “ternaordinata”) seguendo le ditadellamanodestra • “x” pollice, “y” indice e “z” medio • Si, e’ lo stessoordine del prodottovettoriale, non a caso… y O x z
Vettoreposizione • Dato un sistemadiriferimento e’ possibiledeterminare la posizionedi un corpo. • Il vettoreposizionex e’ rappresentatodaunafrecciachecongiungel’origine con ilpunto in cui ilcorpo e’ situato • Non c’e’ nientedispecialenell’usare la lettera “x” per la posizione. Vieneusataspessoanche la lettera “r”, ma ognialtraletterapuo’ essereusata. • Invece e’ importanteusareil “grassetto” o unafreccettinasopra la lettera, per indicarechestiamoparlandodellaposizione come diunagrandezzavettoriale • La posizionex e’ misurata in metri. La misuradellagrandezzaposizione e’ data dallalunghezza del vettoreposizione • O viceversa, la lunghezza del vettoreposizione e’ ilvaloredellagrandezzaposizione y y x x a R z z x NO SI
Coordinate • E’ possibiledefinireunaposizioneanche come un insiemeordinatodi coordinate x(x1, x2, x3) • x (x1, x2, x3) – intendo dire chesono due modiequivalentidiindicare la stessagrandezza • x1 rappresenta la proiezioneortogonaledel vettorex lungol’assedelle “x”, x2 rappresenta la proiezioneortogonale del vettorex lungol’assedelle “y” e x3 rappresenta… • Date le coordinate e’ possibiledisegnare un vettore • Datoilvettoredisegnato e’ possibiledisegnare le coordinate • Un valoredi x1, x2 e/o x3 uguale a zero significacheilvettore x: • Non ha componentilungol’asse “x”, “y” e/o “z” • E’ perpendicolareall’asse “x”, “y” e/o “z” • Giacesul piano “y-z”, “x-z”, “y-z” oppure e’ “lungo la retta “x”, “y”, “z”, oppure e’ nullo • “Con ivettorisidescrive un modello, con le coordinate sifannoiconti”
Coordinate • Primo conto: grandezza del vettore (posizione, ma e’ in generale) • |x| = √ (x12+ x22+ x32) • Secondoconto: angolocheilvettore forma con l’asse “x” • tgq = √(x22+ x32)/x1 • In due dimensionidiventatgq = x2/x1 • Terzoconto: somma o differenzadivettori • x + y = z • z (z1, z2, z3) = (x1+y1,x2+y2, x3+y3) • x - y = w • w (w1, w2, w3) = (x1-y1, x2-y2, x3-y3) • Se usiamoiversorii, j, k (vettoriunitari – dilunghezza “1” - lungol’asse ‘x’, ‘y’ e ‘z’) la scritturax (x1, x2, x3) diventapiu’ coerentementex = (i x1 + j x2 + k x3)
Vettorespostamento • Lo spostamento e’ sempredefinito come la differenzatra due posizioni in due momentidifferentidi tempo: in formulex(t2,t1) = x(t2) – x(t1) • La differenzatra due vettori e’ ancora un vettore • Dati due vettoriposizionex e adisegnati, possiamodisegnare lo spostamentox-a (daaax) e a-x (dax a a) • I vettorix-a e a-x hanno la stessadirezione e grandezza, ma verso opposto y y a-x a a x x z z x x x-a
Vettorespostamento • Il vettorespostamentodaaax puo’ esseredisegnatoanche con gliestremialledue “puntedifreccia” deivettorix-a • In effettimentrea e x dipendonodalsistemadiriferimento, lo spostamentox-a non dipendedalsistemadiriferimento. • Mentre le coordinate deivettoria e Asono diverse, cosi’ come sono diverse le coordinate deivettorix e X, le coordinate deivettorix-a e X-Asonouguali. y y a x-a A X-A x x x X z z
Traiettoria • L’insiemedeipuntioccupatidalcorpoduranteilsuomotox(t) al variare del tempo e’ chiamatotraiettoria. • Unatraiettoriarettilineanellospaziopuo’ esserescrittax(t) = x0 + a t x1 • Unatraiettoriacircolarenel piano “x-y” puo’ esserescrittax(t) = i r sin(wt) + j r cos (wt) • Unatraiettoriaparabolicapuo’ esserescrittanel piano x-z x(t) = i (x0 + vx0 t )+ k (z0 + vz0 t + g t2 ) • In generale la traiettoriapuo’ esserescritta come x(t) = x(t) i + y(t) j + z(t) k • E’ possibileunavolta nota la traiettoriascomporla in piu’ motiunidimensionali– comodo per fare iconti. • “proiezione” dellaposizione del puntosugliassi, ovveroposizionelungol’asse x, ovveromotolunto • Ad esempioilmoto con unatraiettoriaparabolicapuo’ esserescomposto in due equazioni – sistemadiequazioni– in formule: • x(t) = x0 + vx0t • z(t) = z0 + vz0 t + g t2 • Unatraiettoriapuo’ esserescritta come unaseriedispostamenti. • “al limite” glispostamentidiventanoinfinitesimali • “al limite” glispostamentisonotangentiallatraiettoria
Velocita’ • Avendo lo spostamentopossiamodefinire la velocita’ istantaneavettoriale come la derivatadellospostamentorispetto al tempo • In formule: v(t) = d x(t)/dt • Visivamente: dxrappresenta un piccolo spostamento, e al limite e’ tangenteallatraiettoria del moto. • La velocita’ istantaneavettoriale e’ sempretangenteallatraiettoria. • Si disegna come unafrecciaorientatache ha originenelcorpo – scritturadicomodo, non formale • “facendoiconti” e’ possibiledeterminareilvaloredellecomponentidellavelocita’ derivando le componentidellatraiettoria • In formulev(t) = dx(t)/dti + dy(t)/dtj + dz(t)/dtk vxi + vyj + vzk • si assume cheiversorii, j, ksianocostanti • Come nelcasounidimensionalepossiamodefinire la velocita’ vettoriale media, e la velocita’ scalare media e istantanea • vm = (x(t2) – x(t1))/(t2– t1) • vscalarem = ∫|d(x(t))| /T • vscalare = |d x(t)|/dt
Accelerazione • L’accelerazione e’ la derivatadellavelocita’ • Accelerazioneistantaneaa(t) = d(v(t))/dt • Accelerazione media am = ∫dt d(v(t))/dt / ∫dt = (v(t2) – v(t1))/(t2– t1) • “facendoiconti” abbiamo le stesseformulecheabbiamotrovato per la velocita’: • a(t) = dvx(t)/dti + dvy(t)/dtj + dvz(t)/dtk • Visivamentec’e’ unadifferenza: l’accelerazione non e’ sempretangenteallatraiettoria • Si introduce ilconcettodiaccelerazionetangenziale e accelerazionecentripeta • L’accelerazionetangenziale e’ orientatalungo la tangente e ilsuovalore e’ quellodellavariazionedellavelocita’ scalare (del modulo dellavelocita’). • Conseguentemente se ilmotosisvolge a velocita’ in modulo costante – come per esempionelmotocircolareuniforme – l’accelerazionetangenziale e’ nulla. • L’accelerazionecentripeta’ e’ orientataperpendicolarmenteallatraiettoria, lungoilraggio del “cerchioosculatore” e di modulo v2/R
Accelerazionetangenziale e centripeta • La velocita’ e’ sempreorientatalungo la tangenteallatraiettoria • In formule: v(t) = q(t) v(t) • v(t) e’ il modulo del vettorevelocita’ • q(t) e’ ilvettoredi modulo costante e unitariotangentealla • Per esempio, nelcaso del motocircolareuniforme, possiamoscrivereq(t) = icos(wt) – j sin(wt) • L’accelerazioneformalmentesiscrive come a(t) = d(q(t) v(t))/dt • Ovvero: a(t) = q(t) dv(t)/dt + dq(t)/dtv(t) • La componentedell’accelerazionelungo la traiettoria e’ l’accelerazionetangenziale e vale at = q(t) dv(t)/dt • La variazione del vettoretangenteallatraiettoriapuo’ essere solo didirezione; e la variazionedidirezione non puo’ esserecheperpendicolareallatraiettoria • Naturalmenteesisteunatrattazionepiu’ formale… • Quindia(t) = q(t) dv(t)/dt + dq(t)/dt v(t) = atang + acentr