Download

1 / 56
810 likes | 1.65k Views
Automatic Control Theory. School of Information Science and Engineering,CSU Teacher : Yuan Yan auto203@mail.csu.edu.cn 8830971(O),8710510(H) 2014年9月10日. Text Book: 吴麟,自动控制原理(上、下),北京:清华大学出版社 Other Reference Teaching Books:

E N D
Automatic Control Theory School of Information Science and Engineering,CSU Teacher : Yuan Yan auto203@mail.csu.edu.cn 8830971(O),8710510(H) 2014年9月10日
Text Book: • 吴麟,自动控制原理(上、下),北京:清华大学出版社 • Other Reference Teaching Books: • John J.D’Azzo. Linear Control System Analysis and Design (线性控制系统分析与设计,第4版). 北京:清华大学出版社 • Richard C. Dorf, Robert H. Bishop. Modern Control Systems (Ninth Edition)(现代控制系统第九版). 北京:科学出版社 • 胡寿松. 自动控制原理(第四版). 北京:科学出版社
Period: • Teaching hours: 80 hours • Experiment: 8 hours • Total: 88 hours • Exams: • Closedexam. • Grading: • Homework 15%, • Experiments 15%, • Final exam 70%
By the end of this course, the student should be able to • Formulate a mathematical model of a given physical system in time and Laplace domain. • Identify the system order and type. • Determine the system’s time response due to a step, ramp and harmonic input.
Evaluate the system stability using: Routh-Hurwitz criterion, root locus and Nyquist diagrams. • Apply classical control methods such as Bode plots, to design closed loop control of the system. • Apply state space representation of a multiple input multiple output (MIMO) system. • Design a controller and observer for a MIMO system.
Chapter 1 Introduction • 1.1 Automatic Control • 1.2 Open-loop Control System and Closed-loop Control System • 1.3 Constitute of Feedback Control System • 1.4 Classify of Control System
1.1 Automatic Control • 1、Automatic Control Systems permeate life in all advanced societies today. Technological developments have made it possible to • travel to the moon; • explore outer space. And • the successful operation of space vehicle; • the space shuttle; space station; • robot; • industry control, such as the control of temperature, pressure, fluid, lever, and so on.
2、Some Terminologies • Acontrol system--------Acontrol systemis an interconnection of components forming a system configuration that will provide a desired system response. • Reference input (Desired output)------Excitation applied to a control system from an external source. The reference signal produced by the reference selector. It is the actual signal input to control system.
Disturbance input-------A disturbance input signal to the system that has an unwanted effect on the system output. • Output (controlled variable )--------The quantity that must be maintained at a prescribed value, i.e., it must follow the command input without responding to disturbance inputs. • Feedback-----The output of a system that is returned to modify the input.
Error-----The difference between the input and the output. • Open-loop control system – A system in which the output has no effect upon the input signal. Feedback element – The unit provides the measurement value for feeding back the output quantity, or a function of the output, in order to compare it with the reference.
Actuating signal (error signal) – The signal that is the difference between the reference input and the feedback signal. It is the input to the control unit that causes the output to have the desired value. • Negative feedback – The output signal is feed back so that it subtracts from the input signal.
Closed-loop control system – A system in which the output has an effect upon the input quantity in such a manner as to maintain the desired output value. That is, a system that uses a measurement of the output and compares it with the desired output.
3、Control systems are used to achieve: • (1) increased productivity; • (2) improved performance of a device or system. • The control of an industrial process (manufacturing, production, and so on) by automatic rather than manual means is often called automation. • Automation is used to improve productivity and obtain high-quality products.
4、History of automatic control • (1) The first automatic feedback contro-ller used in an industrial process is generally agreed to be James Walt’s flyball governor, developed in 1769 for controlling the speed of a steam engine. Shown in Fig.1.1.
The all-mechanical device, shown in Fig.1.1, measured the speed of the output shaft and utilized the movement of the flyball with speed to control the valve and therefore the amount of steam entering the engine. As the speed increases, the ball weights rise and move away from the shaft axis, thus closing the valve. The flyweights require power from the engine to turn and therefore cause the speed measurement to be less accurate.
(2) J.C.Maxwell formulated a mathema-tical theory related to control theory using a differential equation model of a governor. (1868) • (3)Conventional control theory is effectively applied to many control design problems, especially to SISO systems. Its mathematical foundation is the Laplace transform.
Routh 1884; Hurwitz 1895, algebra stability criterion; • 1932, Nyquist, steady-state frequency-response techniques; • 1927, Bode and Nichols, frequency-response analysis; • 1948, Evans, root-locus theory; • A.M.Lyapunov, stability theory.
(4)Modern control theory(1960) is based on state variable methods, for the design of multiple-input multiple-output(MIMO) systems. • Wiener(1949), Optimum design. • Bellman(1957), Dynamic programming. • Pontryagin(1962), Maxmum principle. • Kalman(1960),Controllability and observability • Kalman and Buey(1961), Combination of optimal filter and optimal controller, Linear quadratic Gaussian(LQG) control.
Classical control theory Modern control theory • SISO, linear ,time-unvarying system • MIMO,nonlinear,time- • varying system • matrix, vector, linear algebra • Laplace transform • Time domain • Time, complex number , • frequency domain • state • output
(5)Advanced control theory(1980) • Robust theory.(1980s) • Intelligent control theory: • Artificial Neural Networks(ANNS); • Fuzzy Control(FC); • Expert System(ES). • GA, GP, EC, Chaos etc. RETURN
1.2 Open-loop Control System and Closed-loop Control System • 1、A control system is an interconn-ection of components forming a system configuration that will provide a desired system response. • A component of process to be controlled can be represented by a block, as shown in Fig.1.2.
(Response) (Stimulus) Cause (Desired response) Effect (Actual response)
2、An open-loop control system utilizes a controller or control actuator to obtain the desired response, as shown in Fig.1.3. The control action is calculated at the initial time t0 and then applied to the physical system over the entire control horizon [t0, tf] without modification. The output is not observed.
An open-loop control system utilizes an actuating device to control the process directly without using feedback. Another open-loop control system:
3、The measure of the output is called the feedback signal. A simple closed-loop feedback control system is shown in Fig.1.4 or Fig.1.5. The advantages and disadvantages of open-loop control system and closed-loop control system The examples of closed-loop system: Example 1: Example 2:
4.Complex control system (ideal control method) Combine open-loop control with closed-loop control RETURN
1.3 Constitute of Feedback Control System • 1、Constitute of feedback control system • Plant +Controller • Plant(process):The device, plant or system under control. • Measurement component(Sensor); • Comparison component; • Amplifier; • Actuating device; • Compensator; Controller
Reference input Input device Control signal sensor Measure device Disturb signal Compare device Compensator amplifier actuator plant controller structure of general control system
2、Analysis of control system Stability: the most important; Performance: the transient and steady-state response performance; Robustness.
3、 “Control” • “Control” is the design and analysis of sensors, actuators, and computational systems (analog or digital) to modify the behavior of physical systems.
Typical steps: • Selection of actuators and sensors • Development of a dynamic model of the system to be controlled • Design of control systems based on the sound fundamental principles • Implementation of the controller using analog or digital electronics
4、Design of control system • (1) Establish the system goals. • (2) Identify the variables to control; • (3) Write the specifications for the variables; • (4) Establish the system configuration and identify the actuator; • (5) Obtain a model of the process, the actuator and the sensor; • (6) Describe a controller and select key parameters to be adjusted; • (7) Optimize the parameters and analyze the performance.
1.4 Classify of Control System • 1.The form of system’s mathematics model • Linear system/ Nonlinear system : the dynamic equation of system is linear differential equation/nonlinear differential equation. • A linear system satisfies the principle of superposition.
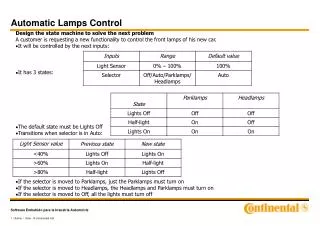
Time-varying system and time-invariant system • Time-varying system is a system for which one or more of the parameters of the system may vary as a function of time. • 2. Reference input • r(t)=constant • r(t)=f(t) • can be known • the vary rule f(t) • cann’t be known “servo”
3. The transfer signal • sequence-time system • discrete-time system
Summary • In order to design and implement a control system, the following essential generic elements are required: • 1) Knowledge of the desired value • It is necessary to know what it is you are trying to control.
2) Knowledge of the output or actual value This must be measured by a feedback sensor ,again in a form suitable for the controller to understand. In additional ,the sensor must have the necessary resolution and dynamic response ,so that the measured value has accuracy required from the performance specification . 3) Knowledge of the controlling device The controller must be able to accept measure-ments of desired and actual values and compute a control signal in a suitable form to drive an actuating element.
4) Knowledge of the actuating device This unit amplifier the control signal and provides the “effort ”to move the output of the plant towards its desired value. 5) Knowledge of the plant Most control strategies requires some knowledge of the static and dynamic characteristic of the plant. These can be obtained formmeasurements or form the application of Fundamental physical laws.or combination of both. RETURN
A general control system can be represented as: Actuating signal (error signal) Feedback element A closed-loop control system uses a measurement of the output and feedback of the signal to compare it with the desired output (reference of command).
1.5 Another block diagram of a generalized feedback control system RETURN
The advantages and disadvantages of open-loop control system and closed-loop control system open-loop control system The main advantages : 1) Much simple and less expansive to construct; 2) Easy to have good stability; The main disadvantages : Require detailed knowledge of each component in order to determine the input value for a required output.
closed-loop control system • The main advantages : • 1) Have higher accuracy; • 2) Not require detailed knowledge of each compo-nent or accurate model of the individual component; • 3) The ability to recover from external, unwanted disturbances; • 4) Reduced sensitivity to disturbance; • The main disadvantages : • 1) Complex and expensive to construct; • 2) the loss of gain; • 3) Quite easy to become unstable.
For most cases, the advantages far outweigh the disadvantages, and a feedback system is utilized. Therefore it is necessary to consider the additional complexity and the problem of stability when designing a control system. RETURN
1.6 Example 1: A water temperature control system