Download
1 / 49
490 likes | 691 Views
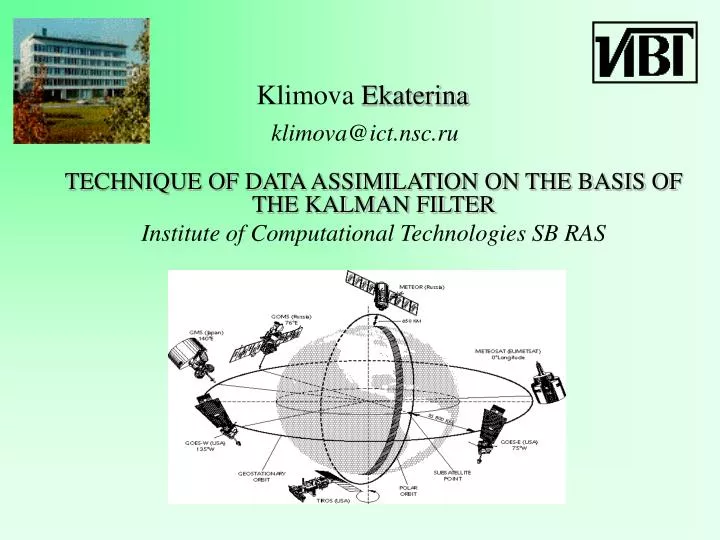
Klimova Ekaterina. klimova@ict.nsc.ru. T ECHNIQUE OF DATA ASSIMILATION ON THE BASIS OF THE KALMAN FILTER Institute of Computational Technologies SB RAS. ATMOSPHERIC PROCESSES in SPACE-ATMOSPHERE-SEA/LAND system. Observing System. SYNOP. AIROCRAFS. AIROLOGICAL DATA. SHIPS.

E N D
KlimovaEkaterina klimova@ict.nsc.ru TECHNIQUE OFDATA ASSIMILATION ON THE BASIS OF THE KALMAN FILTER Institute of Computational Technologies SB RAS
Observing System SYNOP AIROCRAFS AIROLOGICAL DATA SHIPS
Definitions. Definition 1. The problem of the numerical (objective) analysis we shall name a problem of obtaining of "best" in any sense values of an estimated field on the observations. Definition 2. The problem of the joint account of the observational data and forecast modelfor the most exact description of time-space distribution of the meteorological fieldsis named a data assimilation problem.
The Data Assimilation Problem Kalman filter Variational approach Canada, Atmospheric Environment Service (H.Mitchel, P.L.Houtekmer): ECMWF, Meteo France (M.Fisher, E.Andersson): RRKF(redused rank Kalman filter) 4DVAR Ensemble Kalman Filter NASA, DAO (Data Assimilation Office) (D.Dee, S.Cohn): Suboptimal algorithm (1-D, 2-D models)
The connection between 4DVAR and Kalman filter • In the case, when: • The model of atmosphere is linear, • The model errors are absent • Algorithms 4DVAR and Kalman filter • are algebraically equivalent
Procedure of the data assimilation Data Data Forecast Analyses Forecast Analyses ….. 12 hours The forecast: on 12 hours on regional model of an atmosphere The analysis: box - variant of three-dimensional multivariate optimal interpolation The data: GMC of Russia
The analyses of observations Optimal interpolation The forecast errors covariances - rand m-vector of observational errors
The procedure of the analysis Telegrams, a climate Initial processing Data Grid, statistics ( errors of observations and the forecast), first guest Predanalyses The processed data Analyses Values Postanalyses
Regional model of short-term weather forecast Lateral boundary conditions: Boundary conditions on vertical:
Numerical experiments with the data assimilation system Relative error of the forecast and coefficient of correlations. Forecast from 30.03.91 to 03.04.91
Kalman Filter Data Analyses Forecast Dimension : 26*22*15*5=42900
Algorithm of calculation of the forecast errors covariances, based on a splitting-up method:
Model for the forecast errors covariances in a homogeneous izotropic case System of equations for the forecast errors :
The equations for the forecast errors covariances values in 1-stpoint - in 2-ndpoint. The system of equations for the adaptation step:
Model for the forecast errors covariances in a homogeneous izotropic case(Under condition, when 2-dimensional vector of wind speed is rotational). System of the equations for expansion coefficients on eigen vectors of the vertical operator of model - finite-difference analogue of the operator
The simplified models for the forecast errors calculation Let’s assume, that: • the state of the atmosphere in the Kalman filter algorithm is estimated for vertical normal modes of the prognostic model; • the calculation of covariances of prediction errors is based on the assumption that the errors of vertical normal modes do not correlate with each other; it is well-known that the eigenvectors of the vertical operator are close to the natural orthogonal basis. Therefore, they can be assumed to be statistically independent; • the covariances of prediction errors are calculated only for the height field of an isobaric surface, and the covariances of wind field errors are calculated on the basis of geostrophic relations; • the wind velocity fields in the advection operator do not depend on the vertical coordinate p (that is, the background flow is close to a barotropic one).
The simplified models for the forecast errors calculation Model-1 for expansion coefficients on eigen vectors of the vertical operator of model - finite-difference analogue of the operator Let’s concider, that
The simplified models for the forecast errors calculation Model-2 Model-2 isbased on the equation of quazigestrophic vorticity transfer. Model-3 Model-3 isa quasi-linear model described by the equation of quazigestrophic vorticity transfer. - are wind velocity fields at time
The equation for the forecast errors in case : Let where - n – theigen vector
Numerical experiments on the estimation of the simplified models properties Numerical experiments on the estimation ofthe properties of the simplified models are based on a method of forecasting of ensembles. On N=50 of the rand initial fields 50 forecasts on initial model were counted. On this ensemble values the "true" covariance matrixes were appreciated and these values were compared with forecasted ones. Let - the values of isobaric heights (i – the grid number). Let's designate Then
The first eigen vector of matrix Р1for timet = 1 hour (а, б) and t =6 hour. (в,г).
The 6-hour forecast of error covariances of the height field with the help of the simplified model
Suboptimal algorithm, based on the Kalman filter The algorithm, based on Kalman filter, is named suboptimal, if in it for calculation of forecast error covariances the simplified model is used.
The optimal Kalman filter algoritm (continuous in time) Let:С(t)=I, G(t)=I, and A, Q, Rdo not depend from t.
Connection of the estimation received in suboptimal algorithm, with an estimation of Kalman filter I algorithm: II algorithm: III algorithm:
Numerical experiments on the data assimilation with the use of suboptimal algorithm, based on the Kalman filter The algorithm of Kalman filter in which for calculation of matrixes of the forecast errors covariances the simplified model is used is named suboptimal. Calculations on 48 hours assimilation the model data on a height field in each 12 hours were carried out. The data of observations were set in 143 points of a regular grid allocated on forecast area. At realization of experiments it was supposed, that observational errors do not correlate among themselves .
Numerical experiments with «model» data (identical twin) «True»: Forecast: Observations:
Root-mean-squareforecast error (Q=0)s0 – forecast without assimilation;s1 – forecast with assimilation (forecast-analyses cycle);s2 – forecast with assimilation (Kalmanfilter).
Forecast error covariance of the height fieldfor n=1 (for central point of the region) at t=0 h. (а) and t=12 h. (б).
Dependenceof weight factors of the analysis on the mesh point number (the forecast on 12 hours)
Dependenceof weight factors of the analysis on the mesh point number (the forecast on 24 hours)
Kalman filter • R.Todling, S.Cohn (DAO, NASA),1994 Suboptimal algorithms, Based on the Kalman, numerical experiments with the 2-dimensional shallow-water equation (modeled data). • M.K.Tippett, S.E.Cohn,1999 Low-dimensional representation of error covariance (Singular Vectors-SV, 1-dimensional equation of advection). • H.Mitchel, P.L.Houtekmer (Canada),1997 Ensemble Kalman filter (3-level quasi-geostrophicmodel, modeled data); 1999ensemble adaptive Kalman filter (the same model); 2001Sequantial Ensemble Kalman filter (splitting of the data into subsets), only analyses, modeleddata; 2002 – SEKF – numerical experimentswith the global adiabaticmodel 21*144*72, modeled data.
Kalman filter • P.F.J.Lermusiaux (Harvard University, Cambridge), 1994 Ensemble Kalman filter on theEOF subspace, model data (identical twin). • С.P.Keppenne (Goddard Space Flight Center, Mariland), 2000 Ensemble Kalman filter, sub-regions, 2-level spectral shallow-water model. • B.R.Hunt, E.Kalnayet al (University of Maryland, Arizona State University, USA), 2004 Four-dimensional ensemble Kalman filtering ( 4DVAR and ensemble KF, model of Lorenc).