Download
1 / 12
120 likes | 269 Views
mage registration by model criteria. R. S. Schestowitz, C. J. Twining, T. F. Cootes and C. J. Taylor. Overview. Non-rigid registration (NRR) Registration and models Experiments Models as a similarity measure Toward automatic appearance model construction Results Conclusions.

E N D
mage registration by model criteria R. S. Schestowitz, C. J. Twining, T. F. Cootes and C. J. Taylor
Overview • Non-rigid registration (NRR) • Registration and models • Experiments • Models as a similarity measure • Toward automatic appearance model construction • Results • Conclusions
Non-rigid Image Registration • Results in overlap of analogous structures. • Transforming (warping) images. • Evaluation using similarity measures.
NRR - Problems • Results are arbitrary (not unique). • Objective function defines ‘goodness’ of a solution. • Many sets of warps provide equally good solutions. • The search method chosen affects the results. • Suffers from limitations in certain cases: • Inter-subject registration with structural difference. • Registration of sets of images.
Registration and Models • Models of shape and appearance capture variation. • NRR closely-related to building combined models. • Given a registered image set: • Correspondences are known. • A combined model can be built. • Method for finding unique dense correspondence: • Find set of warps that lead to best model. • Best model defined by Minimum Description Length. • MDL approach developed for shapes. • Can be extended for combined models.
Model Complexity • We approximate MDL to gain speed. • Infer from covariance matrix of model. • We obtain . • This approximates the determinant . • avoids multiplication by 0. • are the n Eigen-values of the covariance matrix whose magnitude is greatest. • Log simplifies calculation.
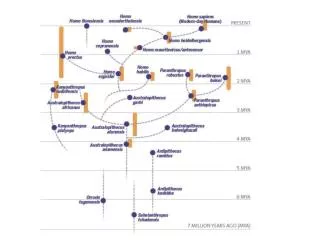
Experiments - Data • To demonstrate feasibility, we registered 1-D data. • No difference in principle between 1- 2-, and 3-D. • We Investigated bumps (half-ellipses) that vary in: • Horizontal orientation • Width • Height • The correct solution is known. • Validation w.r.t. the correct solution.
Experiments - Optimisation • Optimisation of the model-based objective function: • Carried out by applying clamped-plate splines. • Localised, random warps are applied • One image is transformed at a time. • Objective function is optimised w.r.t. warp magnitude.
Results of Registration Before registration After registration Objective function • Result approaches the solution defined by the model.
Resulting Models • The combined model captures variability. • Decomposes into 3 dimensions of variation. Before registration At correspondence After registration
A Subset Approach • By stochastically choosing subsets: • Optimisation becomes more robust. • Solution is reached more quickly.
Conclusions • Modelling need not be independent of registration. • Registration by models provides unique solutions. • Correspondence in sets is identified in the process. • Combined models are refined autonomously. • The process benefits from treating subsets.