Download
1 / 14
140 likes | 247 Views
CONCLUSIONS. *. T. (. ). WO. SUB. POPULATIONS OF MOTION SENSORS WITH. WITH DIFFERENT CHARACTERISTICS MUST BE. MAE-. RESPONSIBLE FOR THIS DIFFERENCE IN. DIRECTION. *. W. MAE. ?. HERE DO THESE. S ORIGINATE. *...E. VEN MORE EXCITING RESULTS WILL BE PRESENTED. ). ECVP. O. (.

E N D
CONCLUSIONS * T ( ) WO SUB POPULATIONS OF MOTION SENSORS WITH WITH DIFFERENT CHARACTERISTICS MUST BE MAE- RESPONSIBLE FOR THIS DIFFERENCE IN . DIRECTION * W MAE ? HERE DO THESE S ORIGINATE *...E VEN MORE EXCITING RESULTS WILL BE PRESENTED ) ECVP O ( AT THE IN XFORD VAN DER SMAGT ET AL.
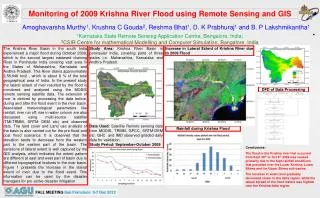
The Aftereffect of transparent motion: integration or segregation is determinedby the type of test pattern Maarten J. van der Smagt Frans A.J. Verstraten Wim A. van de Grind Universiteit Utrecht
15 Static test Dynamic test 10 MAE Duration (s) 5 0 0 25 50 75 Adaptation Speed (deg/s) Expt. 1 Verstraten et al. (ARVO '98)
Adaptation Stimulus Dynamic test Static test Adaptation Stimulus Dynamic test Static test Expt. 2 Verstraten et al. (ARVO '98)
Purpose of this study • The low speed channel is tapped by the static test pattern. • The high speed channel is tapped by the dynamic test pattern. • What happens if we construct a test pattern that has both static and dynamic characteristics….
Do both channels interact in the MAE ? • How does this interaction depend on parameters like: • component direction and speed ? • test contrast ? • the relative strength of both static and dynamic components in the test pattern ?
Method Adaptation: • Transparent motion, consisting of two components (RPA, 256*256 pixels). • component 1: 1 deg/s (1 pixel/ 4 frames). • component 2: 32 deg/s (8 pixels/ 1 frame). Test: • Test pattern consisting of two components. • component 1: stationary RPA. • component 2: dynamic RPA (refreshed every 2 frames, = 45Hz).
A D APT space space space space space space T E S T time time time time time time Stimuli Component 1 Component 2 Superimposed
A D APT opposite orthogonal same slow only fast only M A E Summary of main result
Parameters • Component direction: • no influence on percept. • Component speed: • as long as both components fall well within only one of the speed tuning curves. • (mean) Test contrast: • no influence on percept. • Ratio of test components (Static-Dynamic Ratio; SDR): • A transparent MAE is perceived, as long as both components are clearly visible in the test stimulus.
25 25 25 20 20 20 15 15 15 10 10 10 5 5 5 0 0 0 0.01 0.01 0.01 0.1 0.1 0.1 1 1 1 10 10 10 100 100 100 Results individual components (RAJ) Static component Dynamic component opposite, orthogonal, same MAE Duration (s) Static-Dynamic Ratio (SDR)
20 20 20 15 15 15 10 10 10 5 5 5 0 0 0 0.01 0.01 0.01 0.1 0.1 0.1 1 1 1 10 10 10 100 100 100 Results individual components (TL) Static component Dynamic component opposite, orthogonal, same MAE Duration (s) Static-Dynamic Ratio (SDR)
Conclusions • High- and low-velocity channels are adapted separately. • Their MAE's show up under different test conditions. (Verstraten et al. ARVO '98) • Both channels are highly independent. • When we submit them to our new test pattern, no integration takes place; both test components elicit a separate MAE, resulting in a transparent illusory motion. • Varying different parameters, such as direction, speed, contrast and SDR, has little or no effect on this illusion. • Integration of vectors in the MAE only occurs within and not between the high- and low-velocity channels.