Download
1 / 16
160 likes | 196 Views
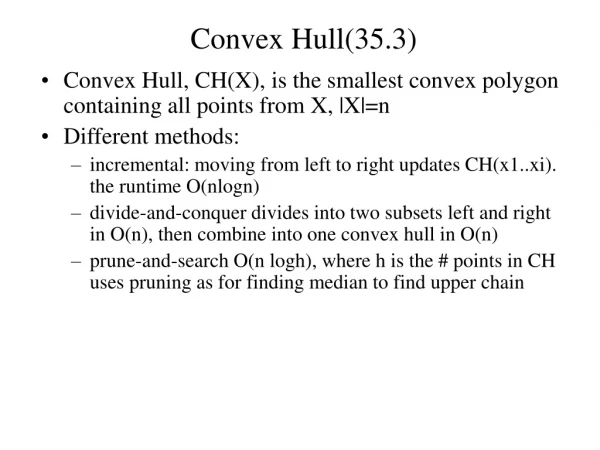
This paper presents an algorithm to compute the minimum perimeter convex hull of a set of disjoint segments, involving contraction strategy, spatial relationship assessment, and shortest path finding. It addresses a novel transformation problem and provides an O(n^5) solution. The study extends beyond traditional convex problems and aims to find the region with minimum perimeter accommodating given segments.

E N D
The Minimum Perimeter Convex Hull of a Given Set of Disjoint Segments YiyangJia and Bo Jiang Dalian Maritime University Linghai Road 1, Dalian, China 2017.5.15
Construction of the minimum perimeter convex hull 01 Abstract 04 02 05 Introduction 03 Preliminaries Conclusion ONTENTS C ONTENTS Our Algorithm 06
01 Abstract In this paper, we present an algorithm to compute the minimum perimeter convex hull of a given disjoint segment set, so that each segment is contained in the hull completely or intersects with the boundary of the hull. The problem discussed in this paper is a novel transformation of TSP and MPSP. To solve this problem, we use a contraction strategy to contract the convex hull from a larger one which contains all endpoints of given segments to the direction of a smaller one which only contains some necessary points. We also assess the spatial relationships between outside segments and its convex hull, and add necessary segments into the convex hull successively by finding the shortest path of a sequence of segments. As a result, we present an O(n5) algorithm for computing the minimum perimeter convex hull of a given set of disjoint segments.
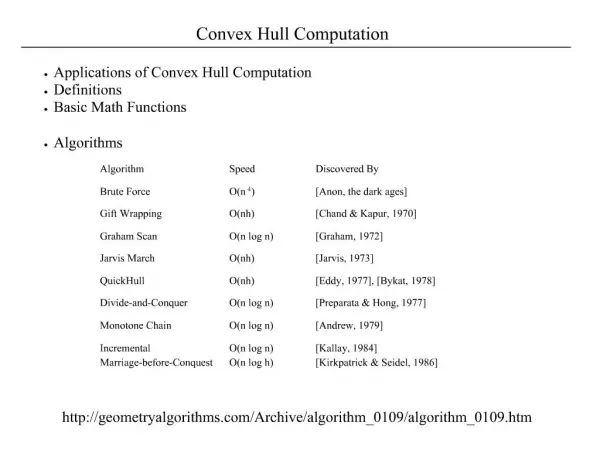
02 Introduction • The Problems of Stabbing a given set of disjoint segments (MPSP) (1) It is an open problem posed by Löffler and van Kreveld [1]. (2) Rappaport presented an O(3mn+nlogn) time algorithm [2]. (3) For parallel segments, Goodrich et al. gave an O(nlogn) time algorithm [3]. (4) Several approximation algorithms are presented by Dumitrescu [4],Hassanzadeh [5] et al. (5) José Miguel Díaz-Báñez et al. proved that if S is a set of pairwise disjoint segments, this problem can be solved in polynomial time; for general segments, this problem is NP-hard [6] • Traveling Salesman problems (TSP) (1) In 1979 Garey M.R and Johnson D.S[7] proved the NP- Completeness of TSP. (2) Related problems: finding simple paths; finding the shortest paths of ordered or partially ordered line segments have been presented and solved in [8,9].
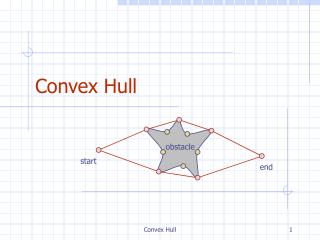
02 Introduction Computing the minimum perimeter convex hull of a given set of disjoint segments is one of the most important extensions, different from traditional convex problems and MPSP, it asks for the minimum perimeter convex hull that each segment in the given set either is contained in it or intersects with its boundary. In other words, it defines a region with a minimum perimeter, each given segment is either completely contained in this region or only has a part in it. The solution can be used to deal with many practical problems such as: finding the containing region of some necessary elements with a minimum perimeter, determining some spatial extent limited by some fixed objects.
02 Introduction
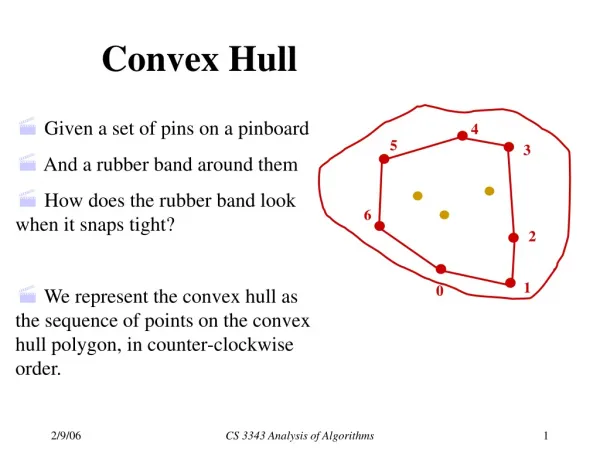
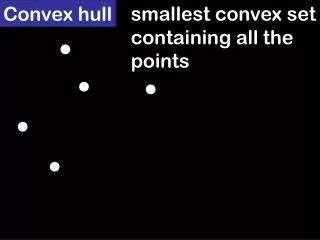
03 Preliminaries and Notation Preliminaries: A convex polygon is a simple polygon (not self-intersecting) with the property that each of its internal angles is strictly smaller than π. A convex hull of a given set of points is a convex polygon that contains all the points in the point set. In a similar fashion, Copt is defined as a minimum perimeter convex polygon which satisfies the following two conditions: (1) Each segment in Φ either is contained in it or intersects with the boundary of it; (2) It has the minimum perimeter among the convex hulls satisfying condition (1). Notation 1:Let Φ denote a set with n disjoint segments in a plane. Each line segment in Φ is denoted by li (1≤i≤n). In addition, the set of all endpoints of all the given segments in Φ is denoted by P, each of them is denoted by pk (1≤k≤2n). Our objective is to find the minimum perimeter convex hull of Φ, its interior or boundary contains at least one point of each li, and denote it as Copt.。 Notation 2:In this paper, we define two kinds of convex hulls: Ω is the convex hull of P ; Ψ is a lower bound of Copt that only contains some necessary points in P. We denote the convex hull got in the j-th contraction as Ωj, and the convex hull got in the k-th expansion as Ψk (j, k∈N+).
03 Preliminaries and Notation
04 Construction of the minimum perimeter convex hull (1) Construction of Ω Ω is constructed based on P with the Graham Scanning Algorithm
04 Construction of the minimum perimeter convex hull (2) Construction of Ψ Construct Ψ with the method below: Put the segments which have points on the boundary of Ω into three sets based on the number of points. L0 : one endpoint; L1 : two endpoints; L2 : whole segment (L0 = {l1, l3, l4, l5}, L1 = {l2}, L2 = {l6}). If L0 has less than two line segments, we consider that Ψ does not exist. Otherwise, compute the convex hull of the endpoints inside Ω of the segments in L0, Ψ is obtained by discarding its vertices whose corresponding line segments have parts inside this convex hull.
04 Construction of the minimum perimeter convex hull (3) Construction of C0 C0 is a precursor of Copt, which is a result of contraction from Ω to Ψ without dealing with the segments in L2. Contract Ω in the counterclockwise (clockwise) order until no vertex on its boundary can be changed again(Ψ is also updated if necessary), then we get C0.
04 Construction of the minimum perimeter convex hull (4) Construction of Copt Copt is constructed by dealing with the segments in L2. Initialize an access sequence of all the segments fixed and ordered by the boundary of C0, compute the shortest path traversing them. For each line segment excluded by the shortest path, insert it into its the sub-sequence by finding a right position in this sequence which does not make the shortest path intersect with itself. Remove right turns on the shortest path.
05 Algorithm Algorithm MPCH O(n5)time Input: A set of segments Φ. Output: The minimum perimeter convex hull Copt . 1 Construct Ω including all the endpoints of the line segments in Φ. (O(nlogn) time) 2 Construct Ψ: (O(nlogn) time) 2.1 Divide the given line segment involved in Ω’s boundary into sets L0, L1, L2. 2.2 Use the inside endpoints of the segments in L0 to construct Ψ. 3 Construct C0 by a contraction process from Ω to Ψ. (O(n2) time) 4 Construct Copt: (O(n5) time) 4.1 Initialize the sequence A of accessing line segments according to C0. 4.2 Find C by computing the shortest path of A. (O(n3) time) 4.3 For each line segment outside C, insert it into its corresponding subsequence. (O(n5) time) 4.4 Remove the unreasonable segments that form right turns and get Copt. (O(n3) time)
06 Conclusions In this paper, we first introduced a problem of computing the minimum perimeter convex hull of a given set of disjoint segments, a given line segment either inside the convex hull or intersects with its boundary. Then we proposed an O(n5) time solution of this problem. This method can be further used to calculate the shortest path of traversing a set of potentially ordered segments with the help of this convex hull we get. This is an interesting research area and we are now working on it.
References 1. Maarten Loffler and Marc van Kreveld: Largest and Smallest Convex Hulls for Imprecise Points. Algorithmica, 2008. 2. Rappaport, D.: Minimum polygon transversals of line segments. Int. J. Comput. Geom. Appl., 1995, 5(3): 243–256. 3. Goodrich, M.T., Snoeyink, J.: Stabbing parallel segments with a convex polygon. Computer Vision, Graphics, and Image Processing, 1990, 49(2): 152–170. 4. Dumitrescu, A., Jiang, M.: Minimum-perimeter intersecting polygons. Algorithmica, 2012, 63(3): 602–615. 5. Hassanzadeh, F., Rappaport, D.: Approximation algorithms for finding a minimum perimeter polygon intersecting a set of line segments. In: Dehne, F., Gavrilova, M.,Sack, J.-R., Tóth, C.D. (eds.) WADS 2009, Springer, Heidelberg, 2009, LNCS 5664: 363–374. 6. José Miguel Díaz-Báñez, Matias Korman, Pablo Pérez-Lantero, Alexander Pilz, Carlos Seara, Rodrigo I. Silveira, New results on stabbing segments with a polygon, Computational Geometry, 2015, 48(1): 14–29. 7. Garey M.R, Johnson D.S. Computers and intractability: A Guide to the Theory of NP-Completeness[M]. Freeman San Francisco, California, USA, 1979. 8. Cheng, Q., Chrobak, M., Sundaram, G.: Computing simple paths among obstacles. Comput. Geom., 2000(16): 223–233. 9. Lijuan Wang, Bo Jiang, Qi Wei, Dandan He. Research on the Algorithm for Euclidean Shortest Paths of Visiting Line Segments in the Plane[J], ICIC Express Letters, 2014, 8(6): 1683-1688. 10. RL Graham, An efficient algorithm for determining the convex hull of a finite planar set. In-formation Processing Letters, 1972, 1(4): 132–133.