Download
1 / 43
430 likes | 560 Views
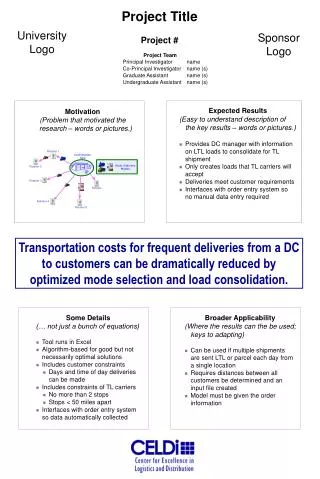
FUFO project. Final report. Contents. Introduction. 1. Hardware & Software. 2. Algorithms. 3. Experiments and results. 4. Conclusion. 5. Introduction. FUFO team. Introduction. History. Definition: A Vertical Take-Off and Landing aircraft. Has 4 rotors. Introduction. History.

E N D
FUFO project Final report
Contents Introduction 1 Hardware & Software 2 Algorithms 3 Experiments and results 4 Conclusion 5
Introduction FUFO team
Introduction History • Definition: • A Vertical Take-Off and Landing aircraft. • Has 4 rotors.
Introduction History • The first Quadrocopter was developed in 1920. • No commercialized Quadrocopter because: Limitation of technology and science at that time.
Introduction History • 8 years before 2012, many institutes and companies began to research on this platform as a small UAV.
Introduction Commercialized product • Airbot X600-BKPP (€ 34,500) • Radio control unit (2.4 GHz) • Live video stream • GPS waypoint navigation • CyberQuad Maxi ($ 36,000) • Radio control unit • GPS waypoint navigation • Live video stream
Introduction Idea • Develop a Quadrocopter for observation purpose.
Introduction Idea Why choosing Quadrocopter platform? • Quadrocopter is more suitable for embedded Engineering students who are not familiar with aerospace issue and mechanical design.
Introduction Idea Why choosing Android Phone? Has built-in camera, Wi-Fi, 3G module Phone is still usable after this Capstone project
Introduction Idea Command Sensor data Bluetooth
Introduction Idea Picture Picture JPEG JPEG
Introduction Idea • Control Mode • Autonomous(Dynamic Stabilization) • Manual
Introduction Idea Manual mode Wind
Introduction Idea Go to 1m Dynamic stabilization Wind Dynamic Stablization SAFE
Hard & Soft Hardware study
Hard & Soft Hardware study • dsPIC30f4012 Microcontroller • Max speed: 30 MIPS • 16x16 bit working arrays • 5 timers, 3 PWM generators • Programmable by C30.
Hard & Soft Hardware study • BMP085 + ADX345 + L3G4200D • All-in-one module: • 3-axis accelerometer. • 3-axis gyroscope. • -300m to 9000m altimeter.
Hard & Soft Hardware study • Turnigy 3000mAh battery pack • 3000mAh x 2 • 253 grams x 2 • 11.1v • Discharge rate: 20C
Hard & Soft Hardware study • Motor and ESC • 1400kv Brushless motors • 8x4” propellers • ESC PWM range: 1ms – 2ms
Hard & Soft Hardware study • HTC HD2 Android 2.3 • 320x240 camera. • Has Bluetooth and Wi-Fi connection • Run on Android 2.3
Hard & Soft Hardware design
Hard & Soft Hardware design
Hard & Soft Frame design Circuit mount 440 mm Motor mount Fiber Glass & Fiber Carbon
Hard & Soft FUFO Quadrocopter
Hard & Soft Software study • Iterative model:
Hard & Soft Software study • Embedded system development:
Hard & Soft Software study • Three software: • Software on PC • Software on Phone • Firmware
Hard & Soft Software study • FSM: System initiated System connected WaitingForConnection Start Verify Power on Control method selected Start button pressed Sensor data initiated Ready SetupForFlight Pending First altitude is chosen Any error Error Hovering Altitude is set to zero Landing Motor stopped
Hard & Soft Software study • PC interface:
Hard & Soft Software study • Android interface:
Algorithms Quadrocopter Dynamic • Inertial Frame, Body frame and Euler Angle:
Algorithms Quadrocopter Dynamic • Input: • 𝜂1 = [x,y,z]; • 𝜂2 = [𝜃,𝜑,𝜓]; • x = y = 0. • Output: • [F1,F2,F3,F4] • Linear translational movement • Rotational movement
Algorithms PID Control system • Open-loop feedback controller:
Algorithms Signal Processing • Euler angles calculation: • Gyroscope: Integration of angular velocity over time. • Accelerometer: Multiplication with a (x,y,z) Direction Cosine Transformation Matrix.
Algorithms Signal Processing • Theta angle by Accelerometer and Gyroscope: AFTER HIGH-PASS AND LOW-PASS FILTER BEFORE FILTER
Algorithms Signal Processing • Theta angle by Accelerometer and Gyroscope: AFTER COMPLEMENTARY FILTER
Experiment Experiments • <Show video>
Experiment Results • Indoor flight:
Experiment Results • Outdoor flight:
Conclusion Achievement
Conclusion Future Improvement • Develop a higher response system. • Hold altitude in narrow and low area with precision of +-0.1 m • Hold a specified position on map or moving on a track. • Obstacle detection and avoidance. • CMOS camera's video transmission over long distance. • Object detection based on image processing.
Thank You ! www.themegallery.com From FUFO team with love