Download
1 / 18
180 likes | 334 Views
Development of Kinetic Penetrators For Exploration of Airless Solar System Bodies. A. Smith, R. Gowen, A. Coates, etc – MSSL/UCL I. Crawford – Birkbeck College London P. Church, R. Scott - Qinetiq A. Ellery, Y. Gao – Surrey Space Centre/SSTL T. Pike – Imperial College

E N D
Development of Kinetic Penetrators For Exploration of Airless Solar System Bodies A. Smith, R. Gowen, A. Coates, etc – MSSL/UCL I. Crawford – Birkbeck College London P. Church, R. Scott - Qinetiq A. Ellery, Y. Gao – Surrey Space Centre/SSTL T. Pike – Imperial College A. Ball, Open University J. Flanagan, Southampton University (UK)
Contents • Introduction • Development Program • Lunar Mission • Summary
Mullard Space Science Laboratory Hinode Launch 22-9-06 • Part of University College London • 140 Staff • In-house mechanical and electrical engineering design, manufacture and test • Provided hardware or calibration facilities for 17 instruments on 12 spacecraft currently operating • Provided stereo cameras for Beagle-2 • Leading PanCam development for EXOMARS
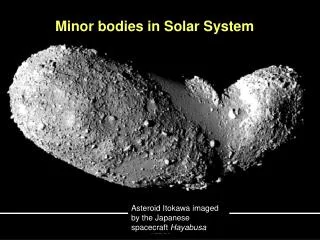
What are airless kinetic micro-penetrators ? • Cannot use aero-braking • High impact speed ~ >200 m/s • Very tough ~>10,000gee • Penetrate surface ~ few metres • Very low mass ~2-5Kg (<12Kg)
Planetary Penetrators - History No survivable high velocity impacting probe has been successfully landed on any extraterrestrial body DS2 (Mars) NASA 1999 ? Mars96 (Russia) failed to leave Earth orbit TRL 6 Japanese Lunar-A much delayed Many paper studies and ground trials
Program Rationale GOAL: To enable key science inexpensively from vanguard missions to a variety of solar system bodies. • Solar system exploration ready for a change of focus from orbital to landed missions. Current great worldwide interest. • Micro-penetrators are capable of exploring multiple regions of planetary surfaces, including areas not suitable for soft landers. • Micro and other technologies (e.g. mems) rapidly advancing, to allow very low mass microprobes (few Kg)-> multiple probes ->high redundancy -> low launch cost. • Potential for innovation.
MSSL Consortium lead, payload technologies, payload system design Birkbeck College London Science Imperial College London Seismometers Open University Science and instrumentation QinetiQ Impact technologies, delivery systems technologies Southampton University Optical Fibres Surrey Space Science Centre and SSTL Platform technologies, delivery system technologies Consortium
Proposed Development Program 1. Design generic penetrator system - Investment to: Enable fast response to opportunities (ready to respond) Enable cheaper future missions (tailoring only) 2. Ground-based demonstration - To build confidence in the technology 3. Lunar mission design - Identify strawman accommodation and baseline environmental and performance requirements for payload elements 4. Follow-up mission opportunities - Science + technology demonstration
Development Process Science Requirements Other Mission Elements Mission Concept Define Mission Requirements Penetrator Payload elements Design Design Environmental Requirements Test Model Test Model Build and Test Penetrator system
Lunar Mission Study In support of a recent ‘MoonLite’ PPARC UK study undertaken by SSTL for a Lunar mission
Lunar Penetrator Science • Lunar Seismology Presence and size of lunar core, crustal & basal fill thickness; deep structure of lunar mantle; Origin & location of shallow moonquakes. (understanding of Moon’s residual magnetism; origin of Earth-Moon system; evolution of planetary magnetic fields) • Lunar Thermal Gradients Inhomogeneity of crustal heat producing elements (U,K,Th). (understanding of Moon’s early history). • Lunar Water Sensing Presence, extent, concentration and origin of water and other volatiles. (Lunar evolution, future lunar resource, implications to astrobiology) • Geochemical Analysis Provide ground truth for remote sensing XFA and multi-spectral imaging. • Far Side Differences in regolith, lunar interior structure, composition.
Lunar Mission Definition • 4 penetrators (13Kg+20Kg propulsion each max) • Science (seismic network, heat-flow, polar volatiles, far side landing, camera) • Surface mission to last 1 year (several years desirable) for seismic network. Other science do not require so long (heat flow perhaps a few lunar cycles) and volatiles much less. • Landing sites to be widely spaced across Lunar surface with at least one site on far side, and at polar region (probably South Pole Aiken basin) for water/volatiles detection. • Orbiter (provide power, pre-ejection health status, and post ejection flight and landed communications) • Technology to be ready for near term launch Descent Phase • Deploy from orbit, using a breaking solid rocket motor to kill orbital velocity.(target impact velocity ~200m/s) • Attitude control to achieve penetration closely perpendicular into Lunar regolith to depth of a few metres. • Camera to be used for descent to characterize landing site • Telemetry to be transmitted continuously during descent for health status (technology demonstration) • Impact accelerometer (to determine penetration depth)
Lunar Mission Definition • Landed Phase • Single body penetrator (no fore-aft body split) for simplicity & risk avoidance, to penetrate to ~1 to few metres into regolith. • All 4 penetrators same platform, different payloads (tbc). • Powered by batteries (1 year lifetime) for seismic network. • Receiver not powered continuously to save power, possibly by carrier detect and with small command capability, or by timer. • Scientific Instruments • Micro-seismometer (3-axis) • Water and Volatiles detector (maybe more than one instrument) • (contenders fibre optics, mems mass spectrometer) • Heat flow detector (not easy) • Tilt Meter (calibrate seismometer and heat flow detector) • Possible Drill (if within mass budget), magnetometer, radiation monitor, microscope?
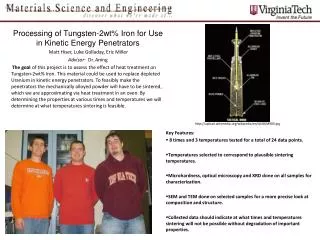
Preliminary Penetrator Concept • POSSIBLE SINGLE-PIECE PENETRATOR • PRE-IMPACT CAMERA • IMPACT ACCELEROMETER • SEISMOMETER • THERMOMETERS (HEAT FLOW) • WATER/VOLATILES DETECTOR • UHF TRANSMITTER AND AERIAL • BATTERIES • DC CONVERTERS • CONTROL & DATA HANDLING • OTHER (micro-drill, magnetometer, rad detector) DETACHABLE PROPULSION STAGE POINT OF SEPARATION 6 CALIBRE RADIUS HEAD TO GIVE NOSE FOR MAX. PENETRATION • ESTIMATED PENETRATOR SIZE • LENGTH:- 480mm to 600mm (8:1 to 10:1 RATIO) • DIAMETER:- 60mm • ESTIMATED MASS 6-8kg SINGLE-PIECE PENETRATOR TUNGSTEN TIP TITANIUM CASING TITANIUM NOSE SECTION
We have formed a consortium to develop kinetic • penetrators for airless planetary bodies through conceptual • design -> ground demonstration -> technical demonstrator • missions -> science missions. • Penetrators are now established as a priority for UK • planetary future directions, and we are strongly supporting • penetrators for a Lunar mission initiative. • We are happy to gain further partners. • We are looking for mission opportunities…. for exciting • engineering and science. Conclusions