Download
1 / 17
270 likes | 1.3k Views
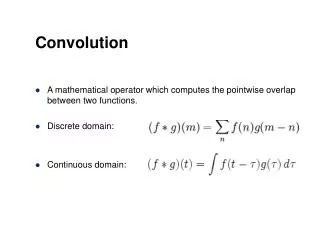
Convolution. A mathematical way of combining two signals to form a third signal. It is the single most important technique in Digital Signal Processing. Using the strategy of impulse decomposition, systems are described by a signal called the impulse response .

E N D
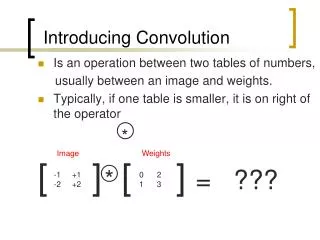
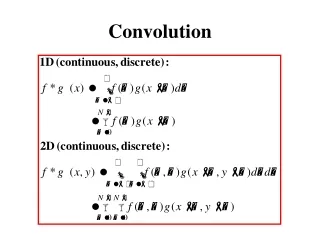
Convolution A mathematical way of combining two signals to form a third signal. It is the single most important technique in Digital Signal Processing. Using the strategy of impulse decomposition, systems are described by a signal called the impulse response. Convolution is important because it relates the three signals of interest: the input signal, the output signal, and the impulse response. Two different viewpoints of convolution , called the input side algorithm and the output side algorithm. Convolution provides the mathematical framework for DSP; there is nothing more important in this course
The Delta Function and Impulse Response The fundamental concept of DSP: the input signal is decomposed into simple additive components, each of these components is passed through a linear system, and the resulting output components are synthesized (added). The signal resulting from this divide-and-conquer procedure is identical to that obtained by directly passing the original signal through the system When impulse decomposition is used, the procedure can be described by a mathematical operation called convolution
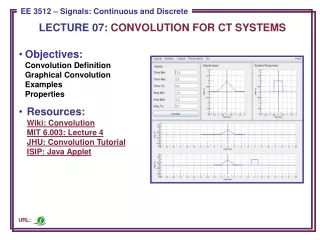
Analog Impulse Response This "shocks" the system suddenly This is the response to the shock. The waveform that results at the output of a device when the input is excited by a unit impulse.
Two important definitions The first is the delta function, symbolized by the Greek letter delta . The delta function is d[n] a normalized impulse, that is, sample number zero has a value of one, but all other samples have a value of zero. For this reason, the delta function is frequently called the unit impulse. The second is the impulse response. the impulse response is the signal that exits a system when a delta function is the input. Different systems, have different impulse responses. Just as the input and output signals are often called and , the impulse response is usually given the x[n] y[n] symbol, . Of course, this can be changed if a more descriptive name is h[n] available, for instance, might be used to identify the impulse response of f [n] a filter.
The delta function isd[n] Any impulse can be represented as a shifted and scaled delta function. Consider a signal, composed of all zeros except sample number 8, a[n] which has a value of -3. This is the same as a delta function shifted to the right by 8 samples, and multiplied by -3. In equation form: a[n] = 3 d[n -8]
Convolution kernel The impulse response goes by a different name in some applications. If the system being considered is a filter, the impulse response is called the filter kernel h[n], the convolution kernel, or simply, the kernel.
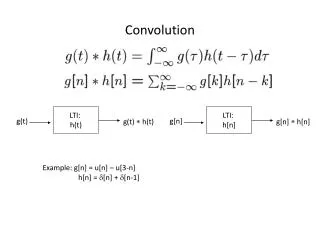
Convolution * The output signal from a linear system is equal to the input signal convolved with the system's impulse response. Convolution is denoted by a star when writing equations.
Joy of Convolution at JHU Click for Joy of Analog convolution and Joy of Digital convolution
Convolution Explained • looking at individual samples on the output signal, and finding the contributing points from the input. • Note how a single point in the output signal is influenced by several points from the input.
Convolution Calculation of single y from many x’s x[-3], x[-2], and x[-1] do not exit Use padding of zero values Continued
Convolution Calculation of single y from many x’s x[9], x10], and x[11] do not exit Use padding of zero values
End effects mess in convolution When an input signal is convolved with an M point impulse response,the first and last M-1 points in the output signal may not be usable. In this example, the mpulse response is a high-pass filter removes the DC component from the input signal. First and last 30 Samples are useless. Since Impulse esponse size is 31.
Convolution Formula -first, one signal is flipped back to front -then, one signal is shifted with respect to the other -the amount of the shift is the position of the convolution function point to be calculated -each element of one signal is multiplied by the corresponding element of the other -the sum of these values is the output
Convolution can be viewed asThe Sum of Weighted Inputs • The characteristics of a linear system are completely described by its impulse response. This is the basis of the input side algorithm: each point in the input signal contributes a scaled and shifted version of the impulse response to the output signal. • The mathematical consequences of this lead to the output side algorithm: each point in the output signal receives a contribution from many points in the input signal, multiplied by a flipped impulse response. While this is all true, it doesn't provide the full story on why convolution is important in signal processing. • Each sample in the output signal is equal to a sum of weighted inputs.
Convolution can be viewed asThe Sum of Weighted Inputs • This makes each sample in the output signal the average of say ten samples from the input. The moving average. Sometimes you will want to think of a system in terms of what its impulse response looks like. Other times you will understand the system as a set of weighing coefficients. You need to know both views.
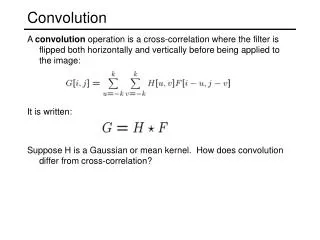
Some observation on convolution and correlation • Convolution requires a lot of calculations. If one signal is of length M and the other is of length N, then we need (N * M) multiplications, to calculate the whole convolution function. • Note that really, we want to multiply and then accumulate the result - this is typical of DSP operations and is called a 'multiply/accumulate' operation. It is the reason that DSP processors can do multiplications and additions in parallel. • Convolution is used for digital filtering. • The reason convolution is preferred to correlation for filtering has to do with how the frequency spectra of the two signals interact. Convolving two signals is equivalent to multiplying the frequency spectra of the two signals together - which is easily understood, and is what we mean by filtering. Correlation is equivalent to multiplying the complex conjugate of the frequency spectrum of one signal by the frequency spectrum of the other. Complex conjugation is not so easily understood and so convolution is used for digital filtering. Convolving by multiplying frequency spectra is called fast convolution.