Download
1 / 8
90 likes | 374 Views
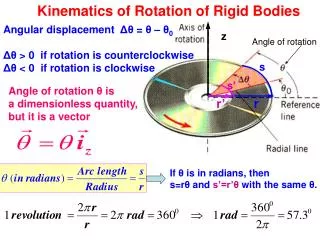
Rotation of rigid bodies. A rigid body is a system where internal forces hold each part in the same relative position. Kinetic Energy and Rotation. Moment of Inertia. (rolling without slipping) and. then. If. Note: I=kMR 2 , where k 1.

E N D
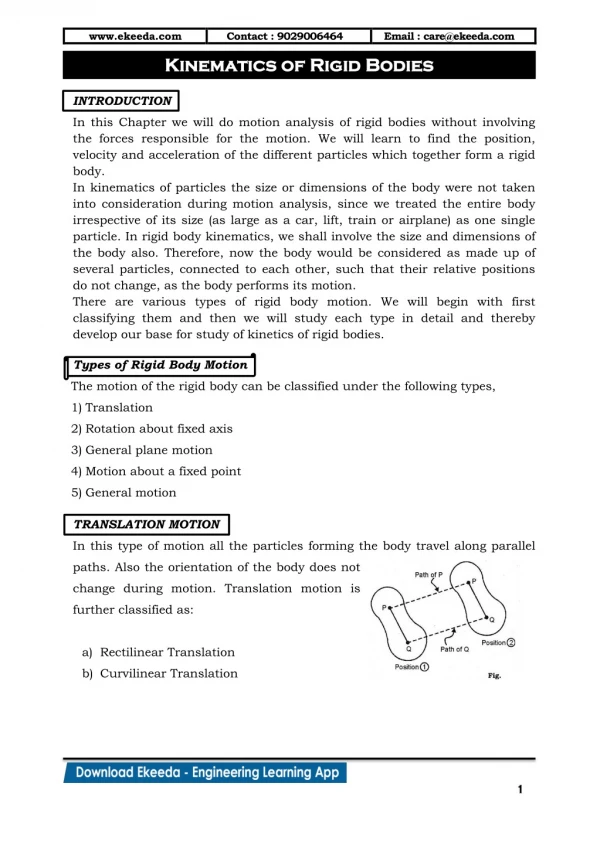
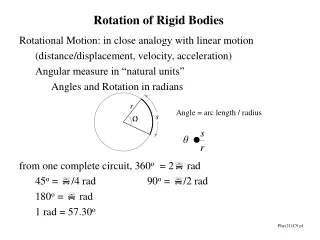
Rotation of rigid bodies A rigid body is a system where internal forces hold each part in the same relative position
Kinetic Energy and Rotation. Moment of Inertia. (rolling without slipping) and then If
Example: Two spheres have the same radius and equal masses. One is made of solid aluminum and the other is a hollow shell of gold. Which one has the biggest moment of inertia about an axis through its center? Mass is further away from the axis Solid aluminum Hollow gold A. Solid AlB. Hollow Au C. Both the same
Axis m m m L L Axis m m m Example: Moment of inertia of a square of side L made with four identical particles of mass m and four massless rods. Axis L m m m m m m The moment of inertia depends on the position and orientation of the axis
Example: Three identical balls are connected with three identical, rigid, massless rods. The moments of inertia about axes 1, 2 and 3 are I1, I2 and I3. Which of the following is true? m L x 3 2 1 A. I1 > I2 > I3 B. I1 > I3 > I2 C. I2 > I1 > I3 I1 = m(2L)2 + m(2L)2 = 8mL2 I2 = mL2 + mL2 + mL2 = 3mL2 I3 = m(2L)2 = 4mL2 Example: Uniform rod of length L and mass M for rotations about the perpendicular axis through its center.
Example:Heavy (real) pulleys. Two blocks of masses m1 and m2 (> m1 ) are connected through a string that goes through two different pulleys. In case 1, the pulley is made of plastic. In case 2, the pulley is made of iron. In both cases, mass m1is initially at rest on the floor and mass m2hangs at distance h from the floor. Both systems are released simultaneously. In which case does mass m2 hit the floor first? R m2 v h h v m1 Case 1;Case 2; Same for both If no slipping:v = R
Parallel-axis theorem Axis A Axis through CM d = L/2 EXAMPLE: Rod of mass M and length L about the axis through one end: