Download
1 / 21
210 likes | 527 Views
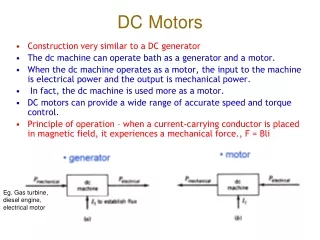
Lecture 31 DC Motors. Learning Objectives. Identify and define the components of a two pole permanent magnetic DC motor (stator, armature, commutator and brushes).

E N D
Learning Objectives • Identify and define the components of a two pole permanent magnetic DC motor (stator, armature, commutator and brushes). • Given the direction of a magnetic field in a two pole permanent magnetic DC motor, determine the direction of force applied to a single armature loop (Lorentz/Force Law). • Understand the effect of multiple armature loops in a DC motor. • Understand the induced effects of rotating a current-carrying closed loop conductor in a magnetic field (Faraday/Lenz/Electromotive Force)
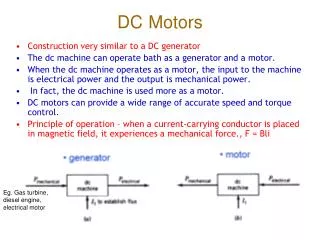
Basic DC Motor Operations • The current passing through the coil creates an electro-magnet with a North/South pole
Basic DC Motor • This electro-magnet interacts with the permanent magnetic field • The opposite poles repel each other, while the like poles attract each other • This causes the motor to spin
In order to provide continuous rotation, the armature current Ia must change direction every 180 of rotation. This process (commutation) is accomplished by brushes and a segmented commutator bar. Commutation Commutator Brushes
Forces on DC motor rotor SOURCE: FISIK.FREE.FR. Applied Physics.
Developed Force and Torque • The force between the rotating electromagnet and the stationary magnetic field is given by the Lorentz Force Law • Torque=Force x Distance: where r = radius from central axis • If power is only applied to the armature wire in the optimum position, the cross product becomes simple multiplication: • In our simple motor we have 2 wires being acted upon: r
Torque • We can significantly increase torque by increasing: • The magnetic field • The current • The number of wires being acted upon • The most practical is to increase the number of wires being acted upon: where N = number of turns of wire • This equation is greatly simplified by using the MACHINE CONSTANT (KV) (V*sec)
Torque • Multiple sets of windings are used on the rotor to ensure that torque is applied smoothly throughout the rotation of the motor. • Each winding is only briefly supplied current when it is at the position where it would apply maximum torque to the rotor • This ensures maximum efficiency of the motor, since power isn’t wasted on forces which try to pull the rotor apart F
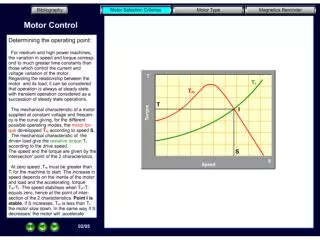
Torque Balance Under steady-state conditions: Tloss Tload Td
Torque Developed power is: Ignoring rotational losses, this developed power is the mechanical output, and machine efficiency can be calculated as:
REVIEW Faraday’s Law • Faraday’s Law states that a voltage is induced in a circuit when a conductor is moved through a magnetic field • In the case of DC linear motors we know that Einduced= B L u • u = velocity • B = magnetic field • L = length of conductor
Faraday’s Law in motors • Induced voltage in motors is given by also Einduced = Ea = Kv ω • Kv is the motor constant (V*sec) • ω is the angular velocity (rad/sec) • Also called Counter EMF (CEMF) or “back EMF” because it opposes the applied voltage. • Angular velocity can be calculated by: ω = 2 (RPM/60)
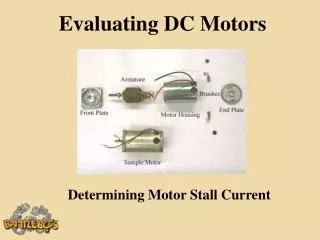
Parts of a DC Motor SOURCE: Gears Educational Systems.
POLES (or FIELD WINDINGS) COMMUTATOR ARMATURE WINDINGS BRUSH ROTOR(entire rotating part) STATOR(stationary part) Actual DC Motor
Points to remember • Torque developed Td=Kv Ia • Mechanical Power DevelopedPd = Td ω = Kv Iaω • Back EMF Ea = Kv ω • Angular velocity ω = 2 (RPM/60) • KVL Vdc-IaRa-Ea=0
Example problem 1 A 120V permanent magnet DC motor is rated for 15A at 3600 rpm. The motor is 85% efficient at rated conditions. Assume no rotational losses. Find: • KV(Machine constant) . • Find the back EMF at 3600 rpm. • Find Ra
Example problem 2 A permanent magnet DC motor has a machine constant, KV = 1.0 ν·s. The no-load torque is 2.0 N-m assuming rotational power loss is linear with speed. (Pd=Pmech-loss) • Determine the mechanical power developed by the unloaded motor at 3600 rpm. • Find the back EMF at 3600 rpm • Determine the armature current.
Example problem 3 A 120 VDC permanent magnet DC motor with KV = 0.95 V·s is measured under the following two conditions (same voltage applied): 1. Motor is unloaded, IA = 2 A. 2. Motor is loaded until IA = 15 A and 1200 rpm. Find: • Torque due to rotational loss. • Torque due to the load in condition 2 assuming rotational power loss is linear with speed. (Pd=Pmech-loss) • Machine efficiency at condition 2?