Download
1 / 11
110 likes | 114 Views
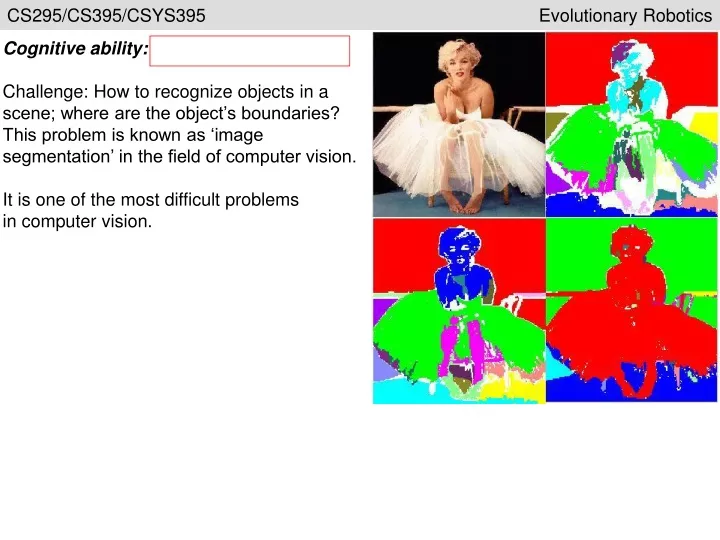
CS295/CS395/CSYS395. Evolutionary Robotics. Cognitive ability: Challenge: How to recognize objects in a scene; where are the object’s boundaries? This problem is known as ‘image segmentation’ in the field of computer vision. It is one of the most difficult problems in computer vision.

E N D
CS295/CS395/CSYS395 Evolutionary Robotics Cognitive ability: Challenge: How to recognize objects in a scene; where are the object’s boundaries? This problem is known as ‘image segmentation’ in the field of computer vision. It is one of the most difficult problems in computer vision.
CS295/CS395/CSYS395 Evolutionary Robotics Cognitive ability: Challenge: How to recognize objects in a scene; where are the object’s boundaries? This problem is known as ‘image segmentation’ in the field of computer vision. Solution: Cog: interacts with the scene, rather than passively observing it. Q: What else can Cog infer about the objects it interacts with? Early integration of vision and manipulation. G Metta, P Fitzpatrick Adaptive Behavior, 2003
CS295/CS395/CSYS395 Evolutionary Robotics Cognitive ability: Kasparov vs. Deep Blue: Won its first game against world champion: Won its first match against world champion: Q: How does Deep Blue work?
CS295/CS395/CSYS395 Evolutionary Robotics Cognitive ability: Example: Another aspect of human cognition: free will. Most people believe that they have free will: “I decide in my mind that I want to do something, and then I do it.” Libet, B., Gleason, C. A., Write, E. W., and Pearl, D. K. (1983). Time of conscious intention to act in relation to onset of cerebral activity (readiness-potential): The unconscious initiation of a freely voluntary act. Brain, 106: 623-642. I decide to move my finger now. (EEG) sensors record brain activity (EMG) sensors record muscle activity The finger moves. Time 0 msec 200 msec
CS295/CS395/CSYS395 Evolutionary Robotics Warning: Thinking about thinking is misleading; introspection is dangerous Example: Another aspect of human cognition: free will. Most people believe that they have free will: “I decide in my mind that I want to do something, and then I do it.” Thinking about free will seems to imply that free will exists … but does it? Observation: Brain activity associated with the finger movement begins 300 msec before the subject experiences the conscious will to move the finger. Conclusion: If free will is unconscious, and our consciousness has no control over it, then it can’t be “free” will. I decide to move my finger now. (EEG) sensors record brain activity (EMG) sensors record muscle activity The finger moves. Time -300 msec 0 msec 200 msec
CS295/CS395/CSYS395 Evolutionary Robotics Embodied Planning Sense Model Model Plan Move
CS295/CS395/CSYS395 Evolutionary Robotics • Behaviors are arranged in parallel, not serial. • 2. One behavior is always in control at any one time. • 3. When stimuli are not present, higherlevels subsume control of the robot.
CS295/CS395/CSYS395 Evolutionary Robotics (This does not count as a body) Why not? A body is a tool for affecting the world, and for being affected by it. Embodied cognition: the way you process information is affected by the fact that you have a body. Example: If you have a body that can move, and you can see, then moving will cause immediate feedback. Non-embodied technologies (such as computers) must wait for feedback from another computer (via packets) or a person (via an input device). Distance grows less Movement
CS295/CS395/CSYS395 Evolutionary Robotics (Embodied cognition: the way you process information is affected by the fact that you have a body.) Situated cognition: the way you process information is affected by the fact that you are physically situated in the world. Example: Embedded devices Changes in sensor readings are often the result of physical processes: 1. they occur in real-time, 2. they are not under the control of the device or agent, 3. and they do not wait for a signal from the device to change. Specific example: A wireless sensor senses changes in light levels; light levels change regardless of whether the device records the data or not. A computer: Data within computer memory does not change, unless it is explicitly changed by the computer itself.
CS295/CS395/CSYS395 Evolutionary Robotics • Embodied and Situated cognition • (Embodied cognition: the way you process information is affected by the fact • that you have a body.) • (Situated cognition: the way you process information is affected by the fact • that you are physically situated in the world. • A complete agent is an agent that is both situated and embodied. • Complete agents have three important properties that distinguish them from other • kinds of agents: • They are subject to the laws of physics (by being in the world). • Q: Examples? • 2. They generate sensory stimulation (through behavior). • Q: Examples? • 3. They affect the environment (through behavior). • Q: Examples?
CS295/CS395/CSYS395 Evolutionary Robotics Classification of technologies: