Download
1 / 21
210 likes | 383 Views
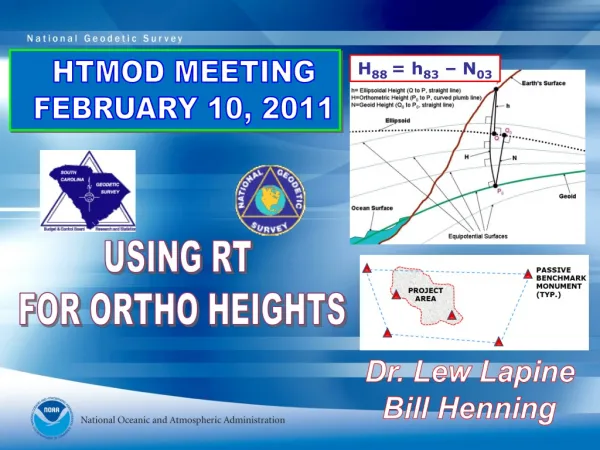
H 88 = h 83 – N 03. HTMOD MEETING FEBRUARY 10, 2011. USING RT FOR ORTHO HEIGHTS. Dr. Lew Lapine Bill Henning. THE TECHNOLOGY SWEET SPOT. SBAS: 2 M H, 6 M V, 0.3 M SMOOTHED H, CHEAP COMMERCIAL DGPS: FEW DM, $$ USCG BEACON: METER+, CHEAP CORS/OPUS: 2 CM h, 5 CM H POST PROCESSED

E N D
H88 = h83 – N03 HTMOD MEETING FEBRUARY 10, 2011 USING RT FOR ORTHO HEIGHTS Dr. Lew Lapine Bill Henning
THE TECHNOLOGY SWEET SPOT • SBAS: 2 M H, 6 M V, 0.3 M SMOOTHED H, CHEAP • COMMERCIAL DGPS: FEW DM, $$ • USCG BEACON: METER+, CHEAP • CORS/OPUS: 2 CM h, 5 CM H POST PROCESSED • DIFFERENTIAL LEVELING: 2-4 CM, LABOR/TIME INTENSIVE, $$$ • GEODETIC LEVELING: mm, LABOR/TIME INTENSIVE, $$$$$ • USER BASE RTK: 2-4 CM H, 2-5 CM V, REQUIRES INITIAL INVESTMENT, OUTCOME KNOWN IN FIELD • RTN: 3-4 CM H, 5-7 CM V, REQUIRES INITIAL INVESTMENT(BUT ½ OF RTK), OUTCOME KNOWN IN FIELD • AERIAL MAPPING: .10 M H, .20 M V, $$$ • LIDAR: 0.10 – 0.3 M V • SATELLITE IMAGERY: 0.5 METER H RESOLUTION, 3 M LOCATION, $$$ • LOW ALTITUDE AERIAL IMAGERY: 2-4 CM H, 3-5 CM V, $$$ • TERRESTRIAL LASER SCANNING: PROJECT SITES ONLY, 0.015 M H, 0.02 M V, REQUIRES INITIAL INVESTMENT
≥200 RTN WORLDWIDE≥80 RTN USA≥37 DOT RTN IN THE USA (JAN 2010) • ACADEMIC/SCIENTIFIC • SPATIAL REFERENCE CENTERS • VARIOUS DOTS + MACHINE GUIDANCE • COUNTY • CITY • GEODETIC SURVEYS (NC, SC) • MANUFACTURERS • VENDOR NETWORKS • AGRICULTURE • MA & PA NETWORKS
RT FOR ORTHO HEIGHTS • ADVANTAGES: • LESS TIME- SECONDS ON POINT • LESS LABOR- NO POST PROCESSING, MINIMAL PERSONNEL • LESS EQUIPMENT – ONLY ONE RT UNIT NECESSARY WITH RTN • = LESS $$$ • USER KNOWS POSITION HAS BEEN CAPTURED AT REQUIRED PRECISION • “GOOD” RELATIVE PRECISION IN HOMOGENEOUS TERRAIN AND USING THE SAME INITIALIZATION • NEW GEOPOTENTIAL DATUM WILL BE ACCESSED THROUGH ACTIVE STATIONSDISADVANTAGES: • LESS ACCURACY THAN LEVELING OR STATIC GNSS • REQUIRES ADEQUATE USER KNOWLEDGE OF ALL EFFECTS ON RT GNSS POSITIONING
RT IN RELATION TO GOALS OF NHMP • Access to accurate, reliable heights nationally- Geoid quality, New geopotential datum via active stations • Consistent Standards across the nation- RTN validation, RTN guidelines • Consistent Results. Data, technology, and tools that yield regardless of terrain and circumstances- Alignment to NSRS • Maintainable system/process that will stand the test of time – ARP velocities, Integrity monitoring, User gets new datum via RTN
NEW APPLICATIONS IN ”HIGH-ACCURACY” REAL-TIME POSITIONING • GIS – INFRASTRUCTURE, SIGNAGE, ENVIRONMENTAL, PHOTO CONTROL • AGRICULTURE • MACHINE GUIDANCE • DEFORMATION MONITORING • TECTONIC/SEISMIC STUDIES • NAVIGATION TO/FROM PORTS • REMOTE SENSING/MAPPING – LIDAR • FAA – NAVIGATION, LANDING, TAXIING • (WEATHER SCIENTISTS – CO-LOCATED RT IONO/TROPO SENSORS)
PRECISION VS. ACCURACY • “PRECISION” IS A COMPUTED STATISTICAL QUANTITY TO THE SOURCE OF THE MEASUREMENT - ALIGNMENT TO THE RTN OR PASSIVE MARK BASE SHOWS PRECISION OF THE OBSERVATION (PER THE DATA COLLECTOR). • “ACCURACY” IS A COMPUTED STATISTICAL QUANTITY TO THE REALIZATION OF THE DATUM - ALIGNMENT OF THE RTN OR PASSIVE MARK BASE TO THE NSRS SHOWS ACCURACY (PER ESTABLISHED METHODOLGY)
CONSTRAINTS (OR NOT) • B ≥ 4 H & V, KNOWN & TRUSTED POINTS? • B LOCALIZATION RESIDUALS-OUTLIERS? • B DO ANY PASSIVE MARKS NEED TO BE HELD? • RT BASE WITHIN CALIBRATION (QUALITY TIE TO NEAREST CALIBRATION POINT)? • B SAME OFFICE & FIELD CALIBRATION USED? FYI: GNSS CAN PROVIDE GOOD RELATIVE POSITIONS IN A PROJECT WHILE STILL NOT CHECKING TO KNOWNS IN AN ABSOLUTE SENSE
NGS SINGLE BASE GUIDELINES • LEGACY EQUIPMENT • NO CELL COVERAGE • NEW RT CLOSEST BASE NETWORKS • MACHINE GUIDANCE AND PRECISION AGRICULTURE USE http://www.ngs.noaa.gov/PUBS_LIB/NGSRealTimeUserGuidelines.v1.1.pdf
RTN GUIDELINES FOR GNSS POSITIONING–WILL NOT SPECIFY OR DEFINE A STANDARD, BUT WILL HELP ADMINISTRATORS AND USERS TO BE AWARE OF ALL THE ISSUES INVOLVED WITH THIS NEW TECHNOLOGY • 60+ CONTRIBUTORS: • NGS ADVISORS • DOT • STATE GEODETIC SURVEYS • GNSS MANUFACTURERS • SRCs • BLM, NPS
THOUGHTS ON ORTHO HEIGHTS ON RTN ARP • LEVELING TO ARP CREATES A NEW BM EASILY USED IN HT MOD PRACTICES • DENSIFIES GNSS ON BENCH MARKS = BETTER HYBRID GEOID MODEL • ARP MONITORED 24/7/365 UNLIKE PASSIVE MARKS • MANY STATE DOTs ARE LEVELING TO THEIR RTN ARP • ROVER HEIGHTS STILL DEPENDENT ON GEOID MODEL FOR ORTHOS • BY ESTABLISHING PASSIVE BMs AT RTN SITE, ELLIPSOID DIFFERENCE CAN PRODUCE ARP ORTHOS (IF DESIRED) – BUT THIS EFFECTIVELY GIVES A MEANS OF MONITORING THE PASSIVE BM USING THE RTN STATION BECAUSE THE ARP POSITION IS ALWAYS KNOWN.
RTCM Paper 014-2007-SC104-462 Improving RTK with RTCM Network Residual Messages • Standard Solution (RMS:21 mm) • Optimized Solution (RMS:13 mm) • 2 Herbert Landau, Xiaoming Chen, Adrian Kipka, Ulrich Vollath - Trimble Terrasat GmbH Positioning improved by up to a factor of 2 Initialization time reduced by 30%
RTN RESIDUAL RTCM 3.x MESSAGE TYPES https://ssl29.pair.com/dmarkle/puborder.php
OPUS-PROJECTS – NGS APPROVED PROGRAM TO VALIDATE A RTN ADJUSTMENT THAT WAS PERHAPS ACCOMPLISHED WITH GNSS MANUFACTURER’S SOFTWARE OR ANOTHER PROGRAM. • OPUS-S – 3 OR 10% OF RTN ARE NGS CORS WHICH THEN GENERATE OPUS-S SOLUTIONS ON ALL OTHER RTN REFERENCE STATIONS. THESE CAN BE PUSHED TO NGS AND PUBLISHED AS 60 DAY PLOTS, OR MAINTAINED ON A PUBLIC SITE AT THE RTN ADMINISTRATION LOCALE. • FIDUCIAL STATIONS - HIGH STABILITY MARKS ARE CONSTRUCTED WITHIN A RTN. GNSS STATIC PROVIDES X,Y,Z. GEODETIC LEVELING PROVIDES NAVD 88. STATIONS MAY BE BLUE BOOKED. USERS CAN THEN TEST THEIR ROVERS AT THE MARKS TO COMPARE THEIR RESULTS FROM THE RTN WITH THE PUBLISHED VALUES. PILOT PROGRAMS PLANNED IN OREGON AND LOUISIANA. • LETTER OF CERTIFICATION- RTN ADMINISTRATOR SENDS A STATEMENT CERTIFYING THAT AS OF A PARTICULAR DATE THE RTN IS ALIGNED TO THE NATIONAL DATUM AT A CERTAIN LEVEL (2 CM LAT/LONG, 4 CM h ?) • NGS REVIEW- NGS DOES A PERIODICAL REVIEW OF THE RTN STATIONS AND ADJUSTMENTS POSSIBLE METHODS OF RTN VALIDATION
IDOP VALUES – 4 CORS EXAMPLE BEST IDOP = 1 √ N THEREFORE, WITH 9 CORS, THE IDOP AT THE CENTROID WOULD BE .33, WITH 4 CORS IT WOULD BE .5 AT THE CENTROID ADDITION OF RMS OF DISTANCE TO CORS CONTRIBUTING TO THE SOLUTION GIVES FINAL UNITLESS NUMBER “IDOP” :THE SUBJECT OF A PAPER BY DRS. CHARLES SCHWARZ, TOM SOLER AND RICHARD SNAY .87 .87 .7 .6 .8 .5 .6 .7 .8 APPLICATION FOR RTN? .87 .87
KNOW YOUR METADATA- UNIFYING THE VERTICALS TO A COMMON DATUM • ALL THESE COME INTO PLAY TO ENABLE THE STRUCTURE TO CLEAR THE BRIDGE! • LMSL • NAD 83 • NAVD 88 • BATHYMETRY • CHART DATUM • BRIDGE DYNAMICS • BRIDGE DIMENSIONS • SHIP SQUAT • SHIP DIMENSIONS