Download
1 / 48
530 likes | 758 Views
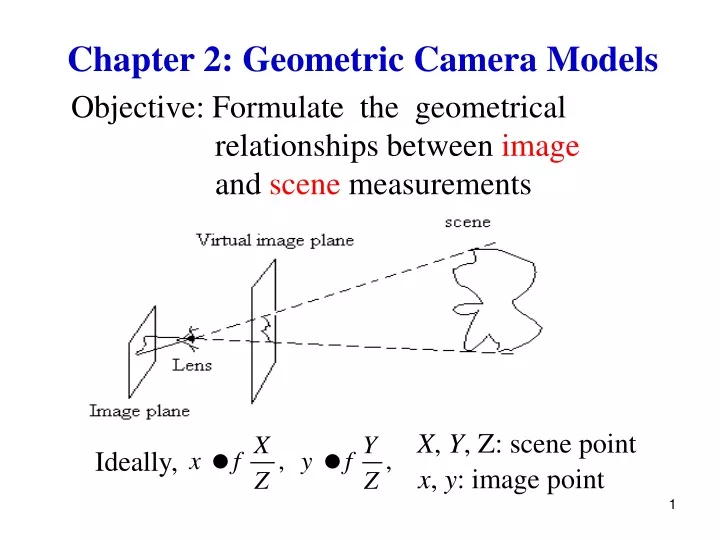
Objective: Formulate the geometrical relationships between image and scene measurements. Chapter 2: Geometric Camera Models. X , Y , Z: scene point. Ideally,. x , y : image point. Contents: (i) Homogeneous coordinates

E N D
Objective: Formulate the geometrical relationships between image and scene measurements Chapter 2: Geometric Camera Models X, Y, Z: scene point Ideally, x, y: image point
Contents: (i) Homogeneous coordinates (ii) Geometric transformations (iii) Intrinsic and extrinsic camera parameters (iv) Affine projection models 2.1. Elements of Analytical Euclidean Geometry 2.1.1. Coordinate Systems ○ Right-handed coordinate system
O: origin; : basis vectors coordinates of point P : position vectorof point P
◎ Homogeneous Coordinates Advantages: (a) Some nonlinear systems can be transformed into linear ones (b) Equations written in terms of homogeneous coordinates become more compact. (c) A transformation, comprising rotation, translation, scaling, and perspective projection, can be written in a single matrix
○ Point: or ○ Plane equation: where
○ Sphere equation: where
2.1.2 Coordinate System Changes and Rigid Transformations Two subjects: (a) Coordinate system changes (b) Rigid transformations Consider two coordinate systems, A and B
○ Coordinate System Changes Position vectors: Coordinate transformation: (?)
○Rigid Transformations 。Translation vector : the vector translates the origin of coordinate system A to that of system B
。Rotation matrix : the 3 by 3 matrix rotates coordinate system A to coincide with system B
The 1st column of is formed by projecting onto The columns of form frame A described in terms of frame B is formed by projecting The 1st row of onto The rows of form frame B described in terms of frame A
* Properties: (a) : unitary matrix (b) (c) orthonormal matrices (d) ○ Rigid Transformation: A rigid transformation preserves: (1) the distance between two points (2) the angle between two vectors
Proof: Let (1) Distance preservation be two points in frame A be their corresponding points in frame B, i.e., Then,
○ Matrices can be multiplied in blocks then ○ ○ In homogeneous coordinates: -- (2.7) where
2.2 Camera Parameters 。 Intrinsic parameters-- Relate the actual camera coordinate system to the idealized camera coordinate system (1) the focal length of the lens f (2) the size and shape of the pixels (3) the position of the principal point (4) the angle between the two image axes Idealized camera Actual camera
。 Extrinsic parameters-- Relate the camera coordinate system to a real world coordinate system (1) translation and (2) rotation parameters Real world Coordinate system Camera coordinate system 。Camera calibration -- estimates the intrinsic and extrinsic parameters of a camera
2.2.1. Intrinsic parameters : scale : skew parameters : shift Start with ideal perspective projection equations 19
○ The relationship between the physical image frame and the normalized one
(Only if) – If , A: nonsingular A can always be factorized into Q: orthonormal matrix L : right upper triangular matrix
Compared with L, K : right upper triangular matrices Q, : orthonomal matrices : vectors W is a perspective projection matrix
2.3. Affine Projection Models • Orthographic Projection Models • -- Objects are far from the camera • Parallel Projection Models • -- Objects are far and lie off the optical axis • of the camera
Weak Perspective Projection Models • -- Objects lie on the optical axis and their reliefs • are ignored \, • Paraperspective Projection Models • -- Objects lie near the optical axis
Consider object reliefs in weak perspective projection