Download
1 / 48
540 likes | 870 Views
Graphplan. Joe Souto CSE 497: AI Planning Sources: Ch. 6 “Fast Planning through Planning Graph Analysis”, A. Blum & M. Furst. Classical Planning. Every node is a partial plan. Initial plan. complete plan for goals. Neoclassical Planning.

E N D
Graphplan Joe Souto CSE 497: AI Planning Sources: Ch. 6 “Fast Planning through Planning Graph Analysis”, A. Blum & M. Furst
Classical Planning • Every node is a partial plan Initial plan complete plan for goals
Neoclassical Planning • Every node in search space is a set of several partial plans • So not every action in a node appears in the solution
Planning Graph • State-space: plan is sequence of actions • Plan-space: plan is partially ordered set of actions Planning graph: sequence of sets of parallel actions ex: ( {a1, a2}, {a3, a4}, {a5, a6, a7} )
Veloso’s Rocket Problem C1 • Solution can be generalized in 3 steps R1 C2 R2 San Francisco C3 R3 St. Louis Seattle
Veloso’s Rocket Problem C1 • Step 1: Load all rockets R1 C2 R2 San Francisco C3 R3 St. Louis Seattle
Veloso’s Rocket Problem • Step 2: Move all rockets San Francisco St. Louis Seattle
Veloso’s Rocket Problem • Step 3: Launch all rockets San Francisco St. Louis Seattle
What does Graphplan do? • Explores the problem with a “planning graph” before trying to find a solution plan • Uses STRIPS operators, except no negated literals allowed in preconditions or goals • Plan-space used ‘least commitment’, but Graphplan uses ‘strong commitments’ • Requires reachability analysis: can a state be reached from a given state? • Requires disjunctive refinement: method of addressing flaws since multiple conflicting propositions can exist in each state • We’ll start with the reachability concept
Reachability • Reachability metric necessary since you have to know if a solution state can be reached from s0 • Can be computed w/ reachability graphs, but computing them is intractable • Can be approximated w/ planning graph, but this is tractable
Reachability Trees • Consider a simple Blocks World Domain S0: B C A • Move(x, y, z) • Precond: On(y, x), Clear(x), Clear(z), etc. • Effects: On(z, x), ~On(y, x), Clear(y), etc.
Reachability Trees B S0: C A Move(B,C,A) Move(A,table,B) Move(B,C,table) etc… A A B C B etc… C Move(A,table,B) Move(B,table,A) Move(C,table,A) Move(A,B,table) A B C B B C C A A B C A etc…
Reachability Trees • Note that a reachability tree down to depth d solves all planning problems with s0 and A, for every goal that is reachable in d or fewer actions • This blows up into O(kd) nodes where k = # valid actions, thus we move on to finding reachability with planning graphs • Could be improved by making a graph rather than tree, but still intractable since #nodes = #states
Planning Graphs • What if all the states reachable from s0 were modeled as a single state? B C A Move(A,table,B) Move(B,C,table) Move(B,C,A) A A B C B B C A C
Planning Graph Idea A B C Move(B,C,table) A B Move(A,table,B) B C A C Move(B,C,A) B C A
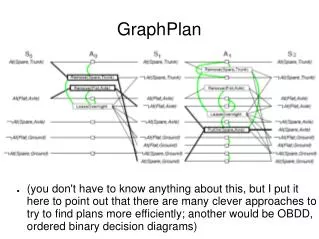
Planning Graphs • Planning graph considers an inclusive disjunction of actions from one node to next that contains all the effects of these actions • Goal is considered reachable from s0 only if it appears in some node of the planning graph • Graph is of polynomial size and can be built in polynomial time in size of input • Since some actions in a disjunction may interfere, we must keep track of incompatible propositions for each set of propositions and incompatible actions for each disjunction of actions
Planning Graphs • Planning graph = directed layered graph with alternating levels of propositions (P) and actions (A) • P0 = initial state • An = set of actions whose preconditions are in Pn • Pn = set of propositions that can be true after n actions have been performed ie: Pn-1 effects+(A1)
Planning Graphs Delete edges • Precondition arcs go from preconditions in Pn to associated actions in An • Add edges indicate positive effects of actions • Delete edges mark negative effects of actions • Also define a no-op operator p:precond(p) = effects+(p) = p and effects-(p) = • Note that negative effects are not removed, just marked. • Pn-1 Pn: “persistence principle” b2 Precondition arcs Add edges
P0 A1 P1 B A B C C A Clear(C) On(B, table) On(B, C) On(A, B) On(A,table) Clear(B) On(B, A) Clear(A) On(C,table) Move(B,C,table) A Clear(B) On(B, C) Clear(A) On(A, table) On(C,table) B C Move(A,table,B) Move(B,C,A) B C A
Definitions • 1) Two actions(a,b) are independentiff: • effects-(a) [precond(b) effects+(b)] = • effects-(b) [precond(a) effects+(a)] = Precond: clear(A), clear(B) Effects+: on(B,A) Effects-: clear(B) A Move(A,table,B) B B C C A Precond: clear(B) Effects+: on(table,B), clear(C) Effects-: none Move(B,C,table) A B C
Definitions • 2) A set of independent actions, , is applicable to a state iff precond() s • 3) A layered plan is a sequence of sets of actions. A valid plan, = <1, … , n>, is solution to problem iff: • Each set i is independent • n is applicable to sn • g (…((s0, 1), 2) … n)
Note • Since planning graph explores results of all possible actions to level n: • If a valid plan exists within n steps, that plan is a subgraph of the planning graph • Allows you to find plan w/ min number of actions
Mutual Exclusion • Can’t have 2 simultaneous actions in one level that are dependent • Two actions at a given level in planning graph are mutually exclusive (“mutex”) if no valid plan can contain both, or no plan could make both true, ie: they are dependent or they have incompatible preconditions • μAi = mutually exclusive actions in level i • μPi = mutually exclusive propositions in level i
Finding Mutex relationships Two rules: • Interference: if one action deletes a precondition of another or deletes a positive effect • Competing Needs: if actions a and b have preconditions that are marked as mutex in previous proposition level
Mutex Example • Mutex by Interference Precond: clear(A), clear(B) Effects+: on(B,A) Effects-: clear(B) A Move(A,table,B) B B C C A Precond: clear(B) Effects+: on(table,B), clear(C) Effects-: none Move(B,C,table) A B C
Mutex Example • Mutex by Competing Needs A) Load(R1, C2, St Louis) B) Load(R2, C2, Seattle) Mutex because C2 cannot be in St Louis and Seattle at same time R1 R2 C2 Seattle St. Louis
Graphplan Algorithm • Input: Proposition level P0 containing initial conditions • Output: valid plan or states no valid plan exists • Algorithm: while (!done) { Expansion Phase: Expand planning graph to next action and proposition level; Search/Extraction Phase: Search graph for a valid plan; if (valid plan exists) return successful plan; else continue; } Graphplan is sound and complete
Expanding Planning Graphs • Create next Action level by iterating through each possible action for each possible instantiation given the preconditions in the previous proposition level, then insert no-ops and precondition edges • Create next Proposition level from the Add-Effects of the actions just generated • Associated with each action is a list of actions it is mutex with
P0 A1 P1 B A B C Mutex list for Move(B,C,table): -Move(A,table,B) -Move(B,C,A) C A Clear(C) On(B, table) On(B, C) On(A, B) On(A,table) Clear(B) On(B, A) Clear(A) On(C,table) Move(B,C,table) A Clear(B) On(B, C) Clear(A) On(A, table) On(C,table) Mutex list for Move(A,table,B): -Move(B,C,table) -Move(B,C,A) B C Move(A,table,B) Mutex list for Move(B,C,A): -Move(B,C,table) -Move(A,table,B) Move(B,C,A) B C A
Finding Graphplan Solution • Solution found via backward chaining • Select one goal at time t, find an action at t – 1 achieving this goal • Continue recursively with next goal at time t • Preconditions of actions in At become the new goals • Repeat above steps until reaching P0 • Performance improved w/ “forward checking”: after each action is considered, Graphplan checks that no goal becomes cut off by this action
Extraction Algorithm • Optimization: Actions that failed to satisfy certain goals at certain levels are saved in “nogood” hash table (▼), indexed by level, so when you backtrack you can prevented wasting time examining actions that were not helpful earlier
Algorithm Example • Initial state: B D C A E • Goal state: On(A, table) On(B, A) On(D, B) Clear(D) On(E, table) On(C, E) Clear(C) D B C A E
P0 P1 A1 A2 P2 Solution: ({Move(B,C,A),Move(D,E,table)}, {(Move(C,table,E),Move(D,table,B)}) B D C A E Clear(A) On(B, A) Clear(C) Clear(D) On(C,table) On(B, table) On(B, C) On(E,table) On(A, B) On(A,table) Clear(B) On(D,E) Clear(E) On(D,table) On(E,table) On(B, A) Clear(C) On(C,E) On(C,table) On(B, table) On(B, C) Clear(D) On(A, B) On(A,table) Clear(B) On(D,E) Clear(E) On(D,table) On(D,B) Move(B,C,D) Clear(B) On(B, C) Clear(A) On(A, table) On(C,table) On(E, table) On(D,E) Clear(D) Move(C,table,E) Move(B,C,A) Move(B,C,table) Move(D,table,B) Move(D,E,table) … Move(D,E,A) …
Monotonicity Property • Recall persistence principle: Since negative effects are never removed, and for :precond(p) = effects+(p) = pPn-1 Pn, propositions monotonically increase Similarly, An-1 An, actions monotonically increase
Unsolvable problems • Due to monotonic property of planning graphs, Pn-1 Pn, and An-1 An • At some point, all possible propositions will have been explored, thus Pn=Pn+k for all k>0 • Graph has “leveled off” (also called “Fixedpoint” in book) • If you reach a proposition level that’s identical to the previous level, and all goal conditions are not present and non-mutex, problem is unsolvable • Thus Graphplan is complete
Graphplan Planning System Two files required to specify a domain • Facts file – describe objects in the problem, initial state, and goal state • Operations file – describe valid operations in that domain
Sample Facts File General Syntax (blockA OBJECT) (blockB OBJECT) (blockC OBJECT) (blockD OBJECT) (preconds (on-table blockA) (on blockB blockA) (on blockC blockB) (on blockD blockC) (clear blockD) (arm-empty)) (effects (on blockB blockA) (on blockC blockB) (on blockA blockD)) (variable_name variable_type) (…) (preconds (literal_name {variable_name1 variable_name2 …}) (…) ) (effects (literal_name {variable_name1 variable_name2 …}) (…) ) Things (operands) in the domain Initial state Goal State
(operator PICK-UP (params (<ob1> OBJECT)) (preconds (clear <ob1>) (on-table <ob1>) (arm-empty)) (effects (holding <ob1>))) (operator STACK (params (<ob> OBJECT) (<underob> OBJECT)) (preconds (clear <underob>) (holding <ob>)) (effects (arm-empty) (clear <ob>) (on <ob> <underob>))) Sample Operations File (operator Operator_name (params (<op1> <op_type>)) (preconds (literal {<op1> <op2> …}) (…) ) (effects (literal {<op1> <op2> …}) (…) ) ) General Syntax
More Samples: Rocket Facts (London PLACE) (Paris PLACE) (JFK PLACE) (r1 ROCKET) (r2 ROCKET) (alex CARGO) (jason CARGO) (pencil CARGO) (paper CARGO) (preconds (at r1 London) (at r2 London) (at alex London) (at jason London) (at pencil London) (at paper London) (has-fuel r1) (has-fuel r2)) (effects (at alex Paris) (at jason JFK) (at pencil Paris) (at paper JFK))
(operator LOAD (params (<object> CARGO) (<rocket> ROCKET) (<place> PLACE)) (preconds (at <rocket> <place>) (at <object> <place>)) (effects (in <object> <rocket>) (del at <object> <place>))) (operator UNLOAD (params (<object> CARGO) (<rocket> ROCKET) (<place> PLACE)) (preconds (at <rocket> <place>) (in <object> <rocket>)) (effects (at <object> <place>) (del in <object> <rocket>))) More Samples: Rocket Ops (operator MOVE (params (<rocket> ROCKET) (<from> PLACE) (<to> PLACE)) (preconds (has-fuel <rocket>) (at <rocket> <from>)) (effects (at <rocket> <to>) (del has-fuel <rocket>) (del at <rocket> <from>)))
Important • Graphplan has no concept of negation. Use propositions with equivalent meaning • Ex: inhand(B) not-inhand(B) • Cannot use _ in any token. Use – instead. • Comments: Begin line with ; • See README file for more details
Running Graphplan • Access in my home directory on Suns:/home/jhs4/graphplan • Contains executable and sample facts/operations files • Execute with: ./graphplan.sparc • Program prompts for names of operations and fact files at runtime • Source for Solaris and Linux in ./solaris-src and ./linux-src respectively
Contact • Trouble running Graphplan? Email me: jhs4(at)lehigh.edu