Download
1 / 22
270 likes | 634 Views
Cruise Control. Karen Lie Engr 315. Outline. Introduction to Cruise Control CC Modeling CC Simulation Introduction to Adaptive Control ACC Modeling ACC Simulation. Cruise Control System. Input: buttons on the steering wheel, brake, clutch, gas pedal and feedback signal Processor

E N D
Cruise Control Karen Lie Engr 315
Outline • Introduction to Cruise Control • CC Modeling • CC Simulation • Introduction to Adaptive Control • ACC Modeling • ACC Simulation
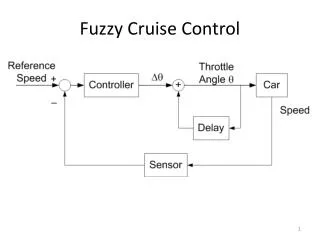
Cruise Control System • Input: buttons on the steering wheel, brake, clutch, gas pedal and feedback signal • Processor • Sensor • Output: the throttle position
Modeling Newton’s Second Law: Laplace Transform:
Design Specification • Rise time < 5 sec • Overshoot < 10% • Steady-State Error < 2%
Closed-Loop w/ PI Control Kp = 100 Kp = 800 and Ki = 40
weight of the car PI Control: Kp = 800 and Ki = 40 m = 500 kg m = 2000 kg
Adaptive Cruise Control • So-called Active Cruise Control (ACC) • Traffic flow characteristics • Collision-avoidance system • Not to be considered as a safety feature by automakers
Background • First laser-based system – Toyota’s Progress, a compact luxury sedan, in 1998 • First radar-based system – Nissan’s Cima 41LV-2, a luxury sedan • First American ACC model – Lexus’ LS 430, in 2000
Function • Preset and maintain the car speed • Measure the distance to the preceding car and the relative speed • Adjust the car speed accordingly • Maximum deceleration = 3.5m/s^2
Adaptive Cruise Control • Change gear automatically • Function properly in poor weather condition • Cannot pick up non-moving objects • Effective in the speed between 30km-180km/h
Two types of ACC • Radar-Based System – Three overlapping radar-beams (76-77kHz) -- Detects moving object up to 120 m – work in poor weather conditions • Laser-Based System (lidar) – less expensive and easier to package – light beams are narrower than water droplet and snowflakes
Modeling in Highway Merging ACC Controller Desired Range By R. Sengupta and Q. Xu
Highway Merge-In Scenario • 1. At 0 sec, the preceding vehicle is traveling 12.5 m/s • 2. The follower vehicle w/ACC is 150 m behind the preceding vehicle and is traveling at 25 m/s • 3. At 10 sec, the third vehicle cut in in between the two vehicles
Simulation in Highway Merging By R. Sengupta and Q. Xu
Acceleration Dotted Line = Desired Acceleration Solid Line = Actual Acceleration By R. Sengupta and Q. Xu
Distance Source Distance Source ACC Response CC Response (for comparison)