Download
1 / 46
460 likes | 595 Views
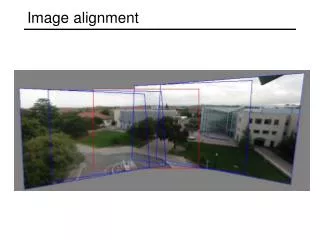
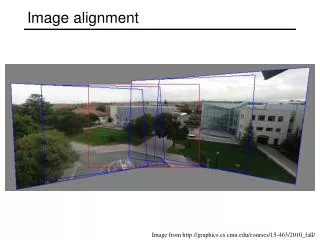
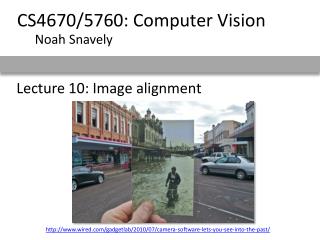
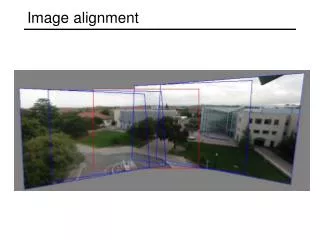
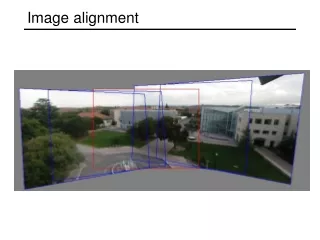
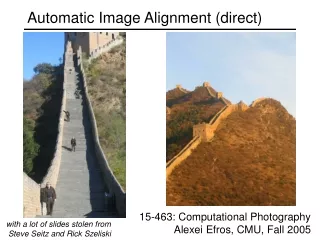
Image Alignment by Image Averaging. David Hong NCSSM, IE364 2008. Example Problem 1. Example Problem 2. Example Problem 3. Problem (Formal Statement). Motivation. Many Applications: Special Effects (Movie) Video Compression Pattern Recognition Image Stabilization (Digital Cameras)

E N D
Image Alignment byImage Averaging David Hong NCSSM, IE364 2008
Motivation Many Applications: • Special Effects (Movie) • Video Compression • Pattern Recognition • Image Stabilization (Digital Cameras) • Dead-reckoning (Mobile Robotics)
State of the Art Optical Flow Lucas-Kanade (1985) Optical Flow with Smoothness Constraint Horn-Schunck(1980) Phase Correlation
Lucas-Kanade U(X,Y) u(x,y,t) Y y x X
Lucas-Kanade Let us consider a point on the plane. Then the floor-coordinate is (X0,Y0) and the sensor-coordinate is (x,y) at time t. From there, we can see:
Lucas-Kanade Differentiating on time gives us:
Lucas-Kanade Expressing (x,y) in terms of (X0,Y0) and the sensor position (Xs,Ys,Θs) gives us:
Lucas-Kanade Putting the two together, we get: This is underdetermined!
Algorithm u’ u
Improvement by Iteration u u’ u’’’ u’’
Improvement by Iteration u’(x’,y’) u’ u’’(x’’,y’’) u’’ u
Improvement by Iteration u’ (x’0, y’0) (x’1, y’0) (x’, y’) (x’0, y’1) (x’1, y’1) Places u’ is defined Place we need to evaluate u’
Improvement by Iteration u’ u’ not defined! u’’ u
Improvement by Iteration u’ u’’ was not evaluated here u’’ Valid Region
Improvement by Iteration (i0,1’, j0,1’ ) (i-1,0’, j-1,0’ ) (i1,0’, j1,0’ ) Places we need to evaluate u’ (i0,-1’, j0,-1’ )
Performance of Algorithm Good Surface: Bad Surface: Algorithm Fails!
Performance of Algorithm Surface:
Performance of Algorithm Surface:
Performance of Algorithm Surface:
Assumptions Made • The Error Function is locally quadratic • The floor is linear
Weaknesses • Many Iterations • Inherent to Technique • “Fooled” by symmetry (Aliasing problem) • Inherent to Problem
Strengths • Accurate • Improvement by Iteration • Finds Error Function Root by Newton’s
Phase Correlation u(xu,yu) v(xv,yv) yu yv xv xu
Phase Correlation We consider the image to be like a 2-D wave. Then, displacement is simply a “phase shift” Rotation can similarly be found So, we “correlate” the “phases”
Weaknesses • Inaccurate on first iteration • Boundary Problem (Repetion Assumption) • High complexity • FFT is “O(nlogn)”
Strengths • Elegant • Makes a big leap • Works well on images with pattern • Separates displacement and rotation (DFT)
Image Averaging u(xu,yu) v(xv,yv) yu yv xv xu
Image Averaging • Find a “Center-of-Mass” of each image • Track the motion of the center-of-mass
Weaknesses • Boundary Problem (Average Point Moves) • Average is affected by small discretization issues
Strengths • Elegant • Makes a big leap • Very fast • Complexity of O(n) • Yields itself well to Improvement by Iteration • Using same technique as in Lucas-Kanade
Handling the Weaknesses • Here we decide to take an alternative approach • Separate displacements from rotation • Do this using FFT (as in Phase Correlation)
Handling the Weaknesses • We handle rotation first • Post-FFT, only rotation remains
Weaknesses • We introduce an FFT ( O(nlogn) operation) • However, only requires 2 • Phase correlation requires up to 3 or 4
Future Work • Make Image Alignment Rigorous • Use complex numbers to notate displacement • Smoothness Constraint • Pre-processing the image • Condition for Convergence