Download
1 / 23
230 likes | 257 Views
Explore the world of goal-directed physical animation and bridge the gap between realism and control in simulator results. Understand the different versions of physical motion: Nature's solution, Model solution, and Numerical solution. Gain insights on the accuracy of numerical solutions and the importance of input values in rendering realistic results.

E N D
Plausible motion simulation Ronen Barzel (on leave from PIXAR) John Hughes (on sabbatical from Brown)
Goals • Set context for the work to be presented in the course. • Correct some misimpressions that people have gotten from our 1996 paper.
How can you do goal-directed (physical) animation? • Make your bed!
Engineer’s Approach Model Simulator Results
Mid-Late 1980s Simulator Forces Model Model Simulator Simulator Results Results “Reconcile realism with control.”
Plausible Animation Simulator Forces Model Model Model Model Model Simulator Simulator Simulator Results Results Results
Exactness? Simulator Forces Result A Model Model Model Simulator Simulator Simulator Result B
Plausible Animation (2) Simulator Forces Model Model Model Model Model Model Simulator Simulator Simulator Simulator Results Results Results Results
Three versions of physical motion • Nature • Model • Numerics
“Nature’s solution” • What really happens in the world • What would really happen in the world if we tried it • Important question: “Tried what?” What’s the situation we’re asking nature about?
Model solution • Might say “Mathematical model” • A simplification of the real world • e.g. rigid body model • e.g. Newton vs. Einstein • Chosen to capture interesting or relevant properties • Expressed as equations of motion
Numerical solution • Approximation to analytic solution of model equations • Given numbers describing objects & state, returns numbers describing their motion.
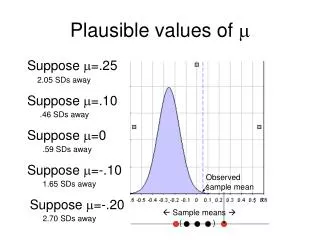
Examine what we mean by the “correct” result • What result should we be willing to accept? Why? • Is there a single correct result?
Graphics models only describe an approximation • Have already made a somewhat arbitrary choice • No need to be too insistent on it • But let’s say it’s as good as we can get…
Numerical solution is always a “cloud” • All values within the cloud are equally accurate • Traditional view: solver computes best answer • the “cloud” can be made arbitrarily small • cloud converges on the “correct” answer. • …but is this always true?
The model may be unstable • Consider a ball that lands exactly on the fence, can fall on either side • Numerical cloud is disjoint • Decreasing tolerance parameter doesn’t cause cloud to converge. • Solver chooses one side or the other arbitrarily • Either side is equally correct • A more “honest” solver would offer both sides, let us choose between them
How good are our input values? • Often describe object as “sphere” or “plane”, etc. • Real-world objects are never exactly spherical or planar • Texture mapping, microfacets, etc. known in rendering to get more realistic results • Similarly we need “texturing” in simulation to get more realistic results
Consider input as a range/distribution Yields distribution of results • If model is stable: • Results may vary slightly • But may be observable • If model is unstable: • Results may vary almost arbitrarily • “Honest” solver would offer range of results
In some sense, we’re saying: • Because of limitations of computing… • We can’t really compute Nature’s solution anyway • There are always many results that are equally appropriate w.r.t. model and inputs • We may as well choose the one we want
But even more: • In principle we can’t know inputs with analytic accuracy • Nature’s solution isn’t unique. • The real world includes instability • Random-number generators: dice • Chaos
Ultimate claim • In no case can we compute a single correct solution • We can therefore choose among them.
Coming up • Stephen Chenney • Jovan Popovic • Ron Fedkiw