Download
1 / 13
130 likes | 249 Views
Problem Solving Steps. 1. Geometry & drawing: trajectory, vectors , coordinate axes free-body diagram, … 2. Data: a table of known and unknown quantities, including “implied data”. 3. Equations ( with reasoning comments ! ), their solution in algebraic form , and

E N D
Problem Solving Steps 1. Geometry & drawing:trajectory, vectors, coordinate axes free-body diagram, … 2. Data:a table of known and unknown quantities, including “implied data”. 3. Equations ( with reasoning comments ! ), their solution in algebraic form, and the final answers in algebraic form !!! 4. Numerical calculations and answers. 5. Check: dimensional, functional, scale, sign, … analysis of the answers and solution.
Formula Sheet – PHYS 218 Mathematics π = 3.14…; 1 rad = 57.30o= 360o/2π; volume of sphere of radius R: V = (4π/3)R3 Quadratic equation: ax2 + bx + c = 0 → Vectors and trigonometry: Calculus:
Chapters 1 - 3 Constants: g = 9.80 m/s2, Mearth = 6·1024 kg, c = 300 000 km/s, 1 mi = 1.6 km 1-Dimensional Kinematics: 3- or 2-Dimensional Kinematics: Equations of 1-D and 3-D kinematics for constant acceleration: Circular motion:
Chapters 4 – 7 Dynamics: Energy, work, and power: Chapters 8 – 11 Momentum: Rotational kinematics:ω = dθ/dt, α = dω/dt, s = r θ, vtan = rω, atan= rα, arad= ac = rω2 Constant acceleration: ω = ω0+αt; θ = θ0+(ω0+ω)t/2, θ = θ0+ω0t+αt2/2, ω2 = ω02+2αΔθ I = Σimiri2, I=Icm+Mrcm2, KR=Iω2/2, E=Mvcm2/2+Icmω2/2+U, WR= ∫τdθ, PR=dWR/dt=τ·ω Rotational dynamics:τ = Fl= Fr sinφ, Rigid body rotating around a symmetry axis: Iαz = τz , Equilibrium: Pressure: p = F┴/A
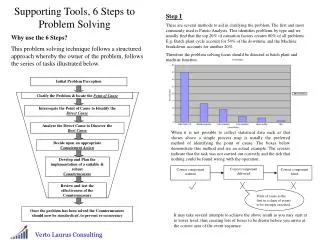
Exam Example 18: The Ballistic Pendulum(example 8.8, problem 8.43) y A block, with mass M = 1 kg, is suspended by a massless wire of length L=1m and, after completely inelastic collision with a bullet with mass m = 5 g, swings up to a maximum height y = 10 cm. L Vtop=0 Find: (a) velocity v of the block with the bullet immediately after impact; (b) tension force T immediately after impact; (c) initial velocity vx of the bullet. Solution: (a) Conservation of mechanical energy K+U=const (b) Newton’s second law yields (c) Momentum conservation for the collision
Exam Example 20: Head-on elastic collision (problems 8.48, 8.50) Data: m1, m2, v01x, v02x Find: (a) v1x, v2x after collision; (b) Δp1x, Δp2x , ΔK1, ΔK2 ; (c) xcm at t = 1 min after collision if at a moment of collision xcm(t=0)=0 V01x y’ V02x m1 X’ m2 Solution: In a frame of reference moving with V02x, we have V’01x= V01x- V02x, V’02x = 0, and conservations of momentum and energy yield m1V’1x+m2V’2x=m1V’01x→ V’2x=(m1/m2)(V’01x-V’1x) m1V’21x+m2V’22x=m1V’201x→ (m1/m2)(V’201x-V’21x)=V’22x= (m1/m2)2(V’01x- V’1x)2→ V’01x+V’1x=(m1/m2)(V’01x–V’1x)→ V’1x=V’01x(m1-m2)/(m1+m2) and V’2x=V’01x2m1/(m1+m2) (a) returning back to the original laboratory frame, we immediately find: V1x= V02x+(V01x– V02x)(m1-m2)/(m1+m2) and V2x = V02x +(V01x– V02x)2m1/(m1+m2) 0 X (a)Another solution: In 1-D elastic collision a relative velocity switches direction V2x-V1x=V01x-V02x. Together with momentum conservation it yields the same answer. (b) Δp1x=m1(V1x-V01x), Δp2x=m2(V2x-V02x) → Δp1x=-Δp2x(momentum conservation) ΔK1=K1-K01=(V21x-V201x)m1/2, ΔK2=K2-K02=(V22x-V202x)m2/2→ΔK1=-ΔK2(E=const) • xcm = (m1x1+m2x2)/(m1+m2) and Vcm = const = (m1V01x+m2V02x)/(m1+m2) → xcm(t) = xcm(t=0) + Vcm t = t (m1V01x+m2V02x)/(m1+m2)
Exam Example 21: Head-on completely inelastic collision (problems 8.86) Data: m2=2m1, v10=v20=0, R, ignore friction Find: (a) velocity v of stuck masses immediately after collision. (b) How high above the bottom will the masses go after colliding? y Solution: (a) Momentum conservation m1 Conservation of energy: (i) for mass m1 on the way to the bottom just before the collision (ii) for the stuck together masses on the way from the bottom to the top (b) h x m2
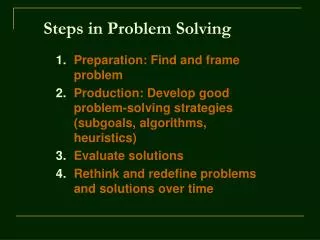
Exam Example 23:Blocks descending over a massive pulley(problem 9.83) ω Data: m1, m2, μk, I, R, Δy, v0y=0 m1 R Find: (a) vy; (b) t, ay; (c) ω,α; (d) T1, T2 Solution: (a)Work-energy theorem Wnc= ΔK + ΔU, ΔU = - m2gΔy, Wnc = - μk m1g Δy , since FN1 = m1g, ΔK=K=(m1+m2)vy2/2 + Iω2/2 = (m1+m2+I/R2)vy2/2 since vy = Rω x 0 m2 ay Δy y (b) Kinematics with constant acceleration: t = 2Δy/vy , ay = vy2/(2Δy) (c) ω = vy/R , α = ay/R = vy2/(2ΔyR) (d) Newton’s second law for each block: T1x + fkx = m1ay → T1x= m1 (ay + μk g) , T2y + m2g = m2ay → T2y = - m2 (g – ay)
Combined Translation and Rotation: Dynamics Note: The last equation is valid only if the axis through the center of mass is an axis of symmetry and does not change direction. Exam Example 24: Yo-Yo has Icm=MR2/2 and rolls down with ay=Rαz (examples 10.4, 10.6; problems 10.20, 10.75) Find: (a) ay, (b) vcm, (c)T Mg-T=May τz=TR=Icmαz ay=2g/3 , T=Mg/3 y ay
Exam Example 25: Race of Rolling Bodies(examples 10.5, 10.7; problem 10.22, problem 10.29) y Data: Icm=cMR2, h, β Find: v, a, t, and min μs preventing from slipping FN x = h / sinβ β x Solution 1: Conservation of Energy Solution 2: Dynamics (Newton’s 2nd law) and rolling kinematics a=Rαz fs v2=2ax
Equilibrium, Elasticity, and Hooke’s Law Conditions for equilibrium: Exam Example 26: Ladder against wall(example 11.3, problem 11.10) d/2 h x Static equilibrium: y State with is equilibrium but is not static. Data: m, M, d, h, y, μs Find: (a) F2, (b) F1, fs, d θ Strategy of problem solution: (c) ymanwhen ladder starts to slip (0) • Choice of the axis of rotation: arbitrary - the simpler the better. (ii) Free-body diagram: identify all external forces and their points of action. (iii) Calculate lever arm and torque for each force. (iv) Solve for unknowns. Solution: equilibrium equations yield (a) F2= Mg + mg ; (b) F1 = fs Choice of B-axis (no torque from F2 and fs) F1h = mgx + Mgd/2 → F1= g(mx+Md/2)/h = fs (c) Ladder starts to slip when μsF2 = fs, x = yd/h → μsg (M+m) = g (mymand/h+Md/2)/h →