Download
1 / 1
10 likes | 112 Views
Department of Computer Science & Engineering. Navigation Controllers for Mobile Robots By Luis D. Echevarria Arroyo, Advisor: Mauricio Castillo-Effen Summer REU Program. Abstract

E N D
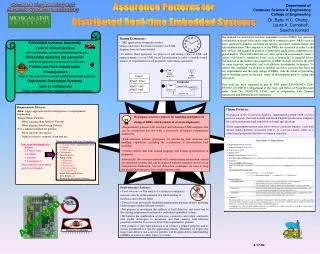
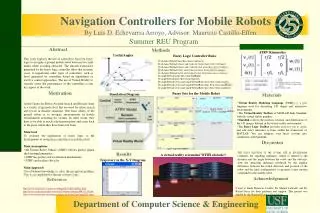
Department of Computer Science & Engineering Navigation Controllers for Mobile Robots By Luis D. Echevarria Arroyo, Advisor: Mauricio Castillo-Effen Summer REU Program Abstract This work explores the use of controllers based on fuzzy logic to navigate a ground mobile robot between two land marks while avoiding obstacles. The smooth trajectories generated by the fuzzy logic controller show that in many cases, it outperforms other types of controllers, such as those generated by controllers based on algorithmic or reactive control approaches. The use of Virtual Reality to visually assess the performance of the controllers is one key aspect of the work. Methods ATRV Kinematics Useful Angles Fuzzy Logic Controller Rules If (distanceToGoal=far) then (move=advance). If (distanceToGoal=close) and (velocity=zero) then (move=advance). If (distanceToGoal=close) and (velocity=not zero) then (move=reduce). If (distanceToGoal=zero) and (velocity=zero) then (move=constant). If (distanceToGoal=zero) and (velocity=not zero) then (move=reduce). If (angleToGoal=neg) then (turn=bigRight). If (angleToGoal=pos) then (turn=bigLeft). If (angleToGoal=zero) and (angleToGoalRate=zero) then (turn=steady). If (angleToGoal=zero) and (angleToGoalRate=neg) then (turn=smallRight). If (angleToGoal=zero) and (angleToGoalRate=pos) then (turn=smallLeft). • Motivation • At the Center for Robot Assisted Search and Rescue, there is a variety of ground robots that are used for urban search and rescue in disaster situations. One basic ability of the ground robots is to navigate autonomously in hostile environments searching for victims. In other words, they have to be able to reach a destination point and come back to the place where they have been sent from. • Main Goal • To evaluate the application of fuzzy logic to the development of navigation controllers for mobile robots. • Main Assumptions • All Terrain Robot Vehicle (ATRV) follows perfect planar skid steering kinematics. • ATRV has perfect self-localization mechanisms. • ATRV can localize obstacles. • Main Approach • Use of human knowledge to solve the navigation problem. This is accomplished by the use of fuzzy logic. Fuzzy Sets for the Mobile Robot • Materials • Virtual Reality Modeling Language (VRML) is a text language used for describing 3-D shapes and interactive environments. • The Virtual Reality Toolbox of MATLAB links Simulink with the virtual reality graphics. • Simulink controls the position, rotation, and dimensions of the 3-D images defined in the virtual reality environment. • The Fuzzy Logic Toolbox provides tools for you to create and edit fuzzy inference systems within the framework of MATLAB. You can integrate your fuzzy systems into simulations with Simulink. Simulation Diagram zero close constant advance far 1 1 reduce 0 1 -1 1 Input “distanceToGoal” Output “move” pos bigLeft steady bigRight 1 neg zero smallLeft smallRight -1 1 -1 1 Input “angleToGoal” Output “turn” fast zero slow 1 0 1 Input “velocity” zero pos 1 neg Discussion The fuzzy rule-base of the system still in development combines the repelling influence, which is related to the distance and the angle between the robot and the obstacle, with the attracting influence produced by the angular difference between the actual direction and position of the robot and the final configuration, to generate a new motion command for the mobile robot. -0.1 Input “angleToGoalRate” 0.1 Results A virtual reality screenshot WITH obstacle!! Trajectory in the X-Y Diagram Acknowledgement I want to thank Mauricio Castillo, Dr. Miguel Labrador and Dr. Rafael Perez for their guidance and support. This project was funded by the National Science Foundation. References http://www.mathworks.com/access/helpdesk/help/helpdesk.html http://www.erudit.de/erudit/events/esit2000/proceedings/BB-02-5-P.pdf http://www.informatik.unistuttgart.de/ipvr/bv/RoboCupCamp2002.html