Download
1 / 18
180 likes | 305 Views
This paper presents a novel and efficient implementation of localization in the Ensemble Kalman Filter (EnKF) to address the computational challenges associated with data assimilation. The proposed method leverages an orthogonal expansion of filter functions, allowing for a split of high-dimensional observations into lower-dimensional sub-vectors for sequential assimilation. Experiments using the Lorenz-96 model demonstrate improved computational efficiency with this method, showing how it can be broadly applicable to other ensemble-based data assimilation techniques, such as En-3DVar and En-4DVar.

E N D
Fast Implementation of Localization for Ensemble DA B. Wang1,2 and J.-J. Liu1 1LASG/IAP, Chinese Academy of Sciences 2CESS, Tsinghua University DAOS-2012,Sep 20, 2012
EnKF The formula of EnKF without localization Localization: where ρxy, ρyy: Filtering matrices; : Schür product operator
andrespectively represent the horizontal and vertical distances between the i-thand j-th row vectors; and are the horizontal and vertical Schür radius. The elements of filter matrix ρxy (similar for ρyy): where the filtering function C0is defined as(Gaspari and Cohn, 1999)
Issues caused by Localization Before localization, it is easy to get the solution: After localization, huge computing time is required for the solution: diagonal
The extra multiplications due to localization • Available solution to the issue • To split the observation vector into a combination of low-dimension sub-vectors • To sequentially assimilate the low-dimension observation sub-vectors
Our new method is tosplitfilter matrix in localization mx-dimension filter eigenvector my-dimension filter eigenvector Filter matrices N is the number of the major modes of the filter matrix
Expansion of filter function in localization Filter function: Base function Orthogonal Weighting function
One-Dimension Filter N=10 Green: Black: where N=15 N=20 C x
Two-Dimension Filter N=10 N=15 N=20 True: y x
Experiment with simple model Lorenz-96 model: • Spatial coordinate: • Forcing parameter: • Solution scheme:4th -order Runge-Kutta scheme • Time stepsize: 0.05 time unit • Periodic boundary conditions: • Note: 0.05 time unit ~6h(Lorenz and Emanuel, 1998)
Red:EnKF with 10 sample (with localization) Blue:EnKF with 500 sample (without localization) RMSE Step of assimilation cycle
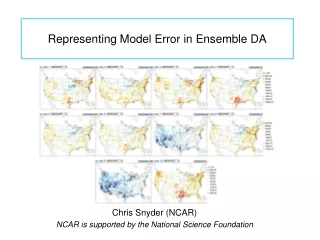
Experiment based on an operational prediction model: AREM RMSEs averaged from 850hPa to 100hPa H CTRL: No assimilation with prediction as IC ERA:Using ERA40 as IC, no assimilation AIRS:Assimilating T & Q of AIRS only TEMP: Assimilating Radiosondes only AIRS+TEMP: With random perturbation AIRS+TEMP—2: No random perturbation
Q T U V
Summary • Localization for EnKF can be economically implemented using an orthogonal expansion of filter function; • The new implementation can be applied to other ensemble-based DA, e.g., En-3DVar and En-4DVar.
Comments, please. Thank you!
“True” states: simulations during a period of time unit after a long-term integration (e.g., 105 model time steps) of the model from an arbitrary IC . • Observations of all model variables: “true” states plus uncorrelated random noise with standard Gaussian distribution (with zero mean and variance of 0.16) • Assimilation experiments: assimilation cycles over a period of 200 days using the EnKF with 18-hr assimilation window and, respectively. 500 samples are used for the experiments so that they have good representativeness.