Download

1 / 16
1.21k likes | 3.95k Views
The Hall Effect Sensor. Rene Dupuis. Background Information. The Hall effect was discovered by Edwin Hall in 1879; “electron” was not experimentally discovered; had to wait until quantum mechanics came

E N D
The Hall Effect Sensor Rene Dupuis
Background Information • The Hall effect was discovered by Edwin Hall in 1879; “electron” was not experimentally discovered; had to wait until quantum mechanics came • Development of semiconductor compoundsin 1950's led to first useful Hall effect magneticinstrument • In the 1960's, first combinations of Hall elements and integrated amplifiers • Resulted to classic digital output Hall switch • In 1965, first low-cost solid state sensor
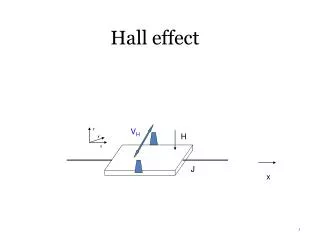
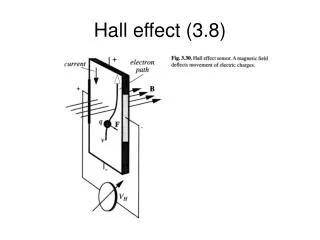
Theory of the “Hall Effect” Hall effect principle, no magnetic field Hall effect principle, magnetic field present Potential Difference (voltage) across output: V = I * B
Basic Hall Effect Sensor • Hall elementis the basic magnetic field sensor • Differential Amplifieramplifies the potential difference (Hall voltage) • Regulatorholds current value so that the output of the sensor only reflects the intensity of the magnetic field
BOP — Operate point A positive magnetic field > BOP will switch the sensor on (output low). BRP — Release point Removal of the magnetic field < BRP will switch the sensor off (output high). Bhys — Hysteresis Unipolar Latching Bipolar Magnetic Parameters Types
Unipolar • Requires single polarity magnetic fieldfor operation • Positive magnetic field (South pole) • Directed towards branded face of the sensor for activation • True-Power-On State • <BOP or >BRP
Latching • Require both positive and negative magnetic fields • Symmetrical Duty Cycle operation • Guaranteed power-up state • >BOP or <BRP
Bipolar Unipolar Mode • Involves either Unipolar or Latching characteristics • Same principle Latching Mode
Sensor switch operation Power-up states
Application: Response to South or North Polarity • Motor-Tachometer application where each rotation of the motor shaft is to be detected • When ring magnet rotates w/ motor, South Pole passes the sensing face of the Hall sensor after each revolution. • Sensor • Actuated when the South Pole approaches sensor • Deactuated when South Pole moves away from sensor • Single digital pulse produced for each revolution.
Application: Gear Tooth Sensing • Sense movement of ferrous metal targets (magnetically biased) • Sensor detects change in flux level • Translates it into a change in the sensor output (high to low)
Benefits • Small and rugged non-contact sensors • Insensitive to oil, dirt, humidity anddust • High magnetic sensitivity • Accurate and Reliable • Delivers low • Power consumption • Supply voltagecapability • Average current consumption
Prices and Sources • Range from $1-$60 • Allied Electronics • Allegromicro • Digi-Key