Download
1 / 26
260 likes | 555 Views
Point Based Animation of Elastic, Plastic and Melting Objects. Matthias Müller Richard Keiser Markus Gross. Andrew Nealen Marc Alexa. Mark Pauly. ETH Zürich. TU Darmstadt. Stanford. Motivation. Motivation. Point-based approach for physically-based simulation

E N D
Point Based Animation of Elastic, Plastic and Melting Objects Matthias MüllerRichard KeiserMarkus Gross Andrew NealenMarc Alexa Mark Pauly ETH Zürich TU Darmstadt Stanford
Motivation • Point-based approach for physically-based simulation • Point based volume (physics)“Phyxels” = physical elements • Point based surface (appearance)“Surfels” = surface elements →No connectivity needed →Inspired byMesh Free Methods
Mesh Free Physics • Advantages • No volumetric mesh needed • Natural adaptation to topological changes • Disadvantages • Difficulty of getting sharp fracture lines • Neighboring Phyxels are not explicitly given • Throughout this work we use Spatial Hashing [Teschner et al. 03] for fast neighbor search (when needed)
Desbrun & Cani [95,96,99] • Physics: Smoothed Particle Hydrodynamics (SPH) • Surface: Implicit with suppressed distance blending • Tonnesen [98] • Physics: Lennard-Jones based forces • Surface: Particles with orientation Related Work
Main Contributions • Point based elasticity model derived from continuum mechanics • SPH designed for the simulation of stars/galaxies • Lennard-Jones designed for molecular interactions • Dynamically adapting, point sampled surface animation • Densely sampled surface • Coupled with coarse physical model (phyxels) • High quality visuals at no simulation cost
Let‘s start with some Physics The volumetric, physical model phyxels in yellow
Simulation Loop • Start with undeformed object and apply external forces (per phyxel) Add external forces Time integration Gradient of displacement field Strain (Greens strain) Stress (Hookean material) Body forces (from elastic energy) Body forces + new external forces = next integration step We start with pure elasticity, and add plasticity/flow thereafter
Reference configuration Deformed configuration x x+u(x) u(x) x’ u(x’) x’+u(x’) Displacement (vector) field: u(x) = (u(x,y,z), v(x,y,z), w(x,y,z)) Continuum Elasticity
→ Strain depends on the spatial derivatives of u(x) u(x) Elastic Strain strain no strain Next: Compute spatial derivatives of the x component u
Computation of the unknown ux, uy and uz at xi by Linear approximation u(xi) xi Dx xj u(xj) • Minimize Estimation of Derivatives → MLS approximation of derivatives
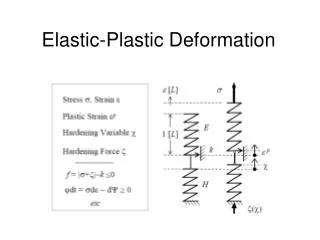
Strain from u • Stress via material law (Hooke) • Energy density (scalar) Elastic Energy Density
Estimate volume virepresented by phyxel ivia SPH • Elastic energy of phyxel i • Phyxel i and all neighbors j receive a force Elastic Forces • Depends on ui and uj of all neighbors j
Change of reference frame (flow) • After each time step: • Copy deformed frame to reference frame: Plasticity • Strain State Plasticity [O’Brien et al. 02] • Reference frame stays fixed
Benefits and Limitations • Pros • Approach based on continuum elasticity • Strain- and stress tensors can be used for plasticity and fracture • Cons • Sparse phyxel sampling → MLS problems • Currently only works well for volumetric objects • Close phyxels always interact→ Extension needed for fracture simulation
So what about the Surface? The volumetric, physical model phyxels (in yellow) The detailed surface model surfels (in blue) This works, as previously discussed Two methods...
Displacement Approach • Displace surfels along with phyxels • Approximation of surfel displacement based on displacement field u • Must be invariant under linear transformations • Reuse first order MLS approximation of u
Displacement Approach Deforming Reference Frame (30 FPS, P4 3GHz)
Displacement Approach + Fast, easy to implement (in Pointshop3D) + Handles very detailed surfaces +Explicit surface model - Doesn’t support topological changes - Needs self-collision detection / response
Multirepresentation Approach • Generate implicit surface LI from phyxels • This guarantees a consistent surface when splitting and merging • Blend between implicit and detailed surface model LD • Displace detailed surface using the previously described displacement approach • Project displaced surfels onto the implicit surface • Blend between these two surfel positions and normals • Resample (for resampling details, see paper)
Multirepresentation Approach • Blending factor based on estimate of local change of topology • Fracture: inside phyxels become boundary phyxels • Merging: boundary phyxels become inside phyxels • Use eigenanalysis of the local covariance to estimate topological change
Multirepresentation Approach Offline simulation at ca. 5 sec./frame
Multirepresentation Approach Offline simulation at ca. 8 sec./frame
Multirepresentation Approach +Can handle arbitrary topological changes +Very detailed models +Interpolation of attributes (Zombie surfels, see paper) -Not interactive
Future Work • Adaptive phyxel resampling • Collision detection and response • Physical modeling of fracture • Surface modeling of fracture • Physical modeling of adhesion/cohesion • Physical modeling of surfaces and strands
Thank you! • Contact Information Andrew Nealen Marc Alexa {nealen,alexa}@informatik.tu-darmstadt.de Matthias Müller Richard Keiser Markus Gross {muellerm,keiser,grossm}@inf.ethz.ch Mark Pauly mapauly@stanford.edu Project Website: http://www.pointbasedanimation.org