Download
1 / 22
220 likes | 370 Views
POS MV Vertical Positioning. March 2004. Where we fit in!.

E N D
POS MV Vertical Positioning March 2004
Where we fit in! “Other sensors (notably modern heave-pitch-roll sensors) can contribute to achieving such 3-D georeferencing accuracies, but non-periodic and very low frequency vertical transducer motions, such as due to tides, squat, long-period heave, and other dynamic draft effects, are adequately measured only by RTK GPS1.” 1Proposal for “Hydrography Research for Marine Vertical Positioning and Seabed Classification”, Dr. Stephan D. Howden and Dr. Denis A. Wiesenburg.
Topics • Positioning • Real-Time Heave • TrueHeave™ • TrueHeave II – The Next Step
Position POS MV Position is a blend of Inertial and GPS data • Position measurements are computed in a strapdown navigator using inertial data • Errors in navigator are estimated and corrected by Kalman filter using data from aiding sensors
Position POS/MV RTK Position Error Vs GPS Outage Duration 10.00 9.00 8.00 7.00 6.00 RMS position error (meters) 5.00 4.00 3.00 2.00 1.00 0.00 0 10 20 30 40 50 60 70 80 90 GPS Outage (seconds) • Today POS allows for replacement of real-time heave with RTK position in echosounder data channels • Loss/degradation of GPS, or corrections, causes vertical accuracy to degrade
Position – Tightly Coupled POS MV Tightly Coupled Position • Kalman filter processes inertial, GPS ranges & range rates & raw corrections • GPS aiding < 4 SVs • Instant RTK lock recovery • Better multipath rejection
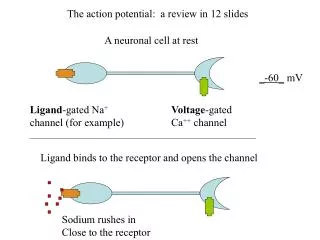
Real-Time Heave Characteristics of Real-Time Heave • Made up of two components • DC (pitch X lever arm) • AC (vertical motion) • Zero mean – filtered vertical motion • Long settling times (3-7 minutes) • Poor accuracy in longer period swells due to phase error in filter • Unacceptable accuracy during transitions of wave encounter period Improvements Offered • Filtering at “sweet spot” • Adaptive setting for filter corner period
Real-Time Heave Filter Information from the Strapdown Navigator • The heave measurement can be viewed as a high pass filter operating on a double integration of vertical acceleration • The high pass filter limits the accelerometer sensor noise in the vertical measurements channel • Filter parameters are set to limit the phase error and settling time of the heave measurement Vertical Acceleration 1st Integration Vertical Velocity 2nd Integration Vertical Displacement High Pass Filter Heave Estimate
TrueHeave – Basic Principles Heave Motion Characteristics: • wave periods are generally from a few seconds to as long as 30 seconds • high frequency energy 0.5 to 4 Hz. • longer waves with higher amplitudes (generally) • vessel characteristics affect vertical motion TrueHeave Filter Objectives: • remove processing artifacts but not real motion • no tuning required for varying sea conditions • provide online quality measurement
TrueHeave – How it works • Additional data channel used to augment the real-time heave channel • Raw vertical acceleration data, complete with unestimated sensor errors, is stored in memory • Once three minutes of data is acquired, a FIR ~zero phase filter is passed over the data • The delayed heave, real-time heave and time tag are output together over Ethernet for logging
Signal Filtering Filter Point Filter Point Data Available to Filter Data Available to Filter Real-Time TrueHeave
TrueHeave – 30 sec 30 minute run, X Scale is IMU time, Y-scale is cm 12 cm heave precision observed in Real-Time 1 cm heave precision can be achieved with TrueHeave
TrueHeave – Rapid Turn 10 minute run, X-Scale is IMU time, Y-Scale in cm Over 20 cm Heave variation seen in Real-Time 6 cm heave precision can be achieved with TrueHeave
Real-Time Heave (3x) TrueHeave (3x) Courtesy D. Lockhart, Fugro
TrueHeave Benefits • Significantly reduced heave error due to ~zero phase error filter • particularly true during long period swells • Shorter turn times, line changes, run-ins, and easier shoreline surveys • due to faster settling time of the FIR filter • Produces a quality measurement on heave data
TrueHeave Challenges • Algorithm still has no ability to measure very long periods (>30 sec) or squat, dynamic draft & tides • Higher accuracy (and cost) IMUs can push the limit to ~60 sec • QC measurement is compared to real-time heave channel
TrueHeave II – The Next Step Objectives • To integrate RTK GPS and IMU data to obtain: • the best estimate of the echosounder head relative to mean sea level • a robust elevation which will survive GPS/RTK outages and data quality problems • To produce an objective QC statistic for Heave
TrueHeave II – The Next Step RTK GPS Pressure IMU Tightly-Coupled POS Navigator TrueHeave Algorithm KF Heave Estimator TrueHeave Delayed Ellipsoid Height
Final Thoughts • TrueHeave is not the whole solution to solving the vertical motion problem • IS using POS MV to measure squat, dynamic draft and tides interesting? • If yes, Applanix is interested in working with other parties to further explore the opportunity