Download
1 / 1
10 likes | 127 Views
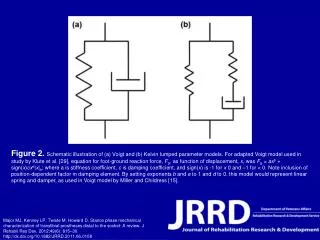
This figure presents schematic illustrations of the Voigt and Kelvin lumped parameter models. The adapted Voigt model, used in studies by Klute et al., describes the foot-ground reaction force (Fg) as a function of displacement (x) using the equation Fg = a * x^b + sign(x) * c * |x|^d * e. Key parameters include stiffness (a), damping (c), and a position-dependent factor in the damping element. The model can represent linear spring and damper systems by adjusting the exponents, providing critical insights into the mechanics of transtibial prostheses.

E N D
Figure 2. Schematic illustration of (a) Voigt and (b) Kelvin lumped parameter models. For adapted Voigt model used in study by Klute et al. [29], equation for foot-ground reaction force, Fg, as function of displacement, x, was Fg = axb + sign(x)cxd|x|e; where a is stiffness coefficient, c is damping coefficient, and sign(x) is -1 for x 0 and –1 for < 0. Note inclusion of position-dependent factor in damping element. By setting exponents b and e to 1 and d to 0, this model would represent linear spring and damper, as used in Voigt model by Miller and Childress [15]. Major MJ, Kenney LP, Twiste M, Howard D. Stance phase mechanical characterization of transtibial prostheses distal to the socket: A review. J Rehabil Res Dev. 2012;49(6): 815–30.http://dx.doi.org/10.1682/JRRD.2011.06.0108