Download
1 / 14
200 likes | 866 Views
Physics 430: Lecture 25 Coupled Oscillations. Dale E. Gary NJIT Physics Department. 11.1 Two Masses and Three Springs. We covered oscillations in Chapter 5, but here we add complexity by considering a system with two oscillators coupled together. The coupling can be strong or weak.

E N D
Physics 430: Lecture 25Coupled Oscillations Dale E. Gary NJIT Physics Department
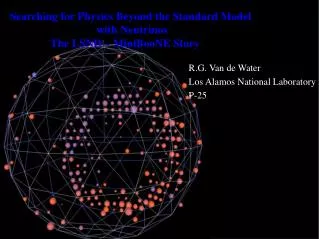
11.1 Two Masses and Three Springs • We covered oscillations in Chapter 5, but here we add complexity by considering a system with two oscillators coupled together. The coupling can be strong or weak. • We will limit the discussion to oscillators obeying Hooke’s Law, and without friction. It is a special case, but one with a wide application. • Consider the situation shown in the figure at right. There are two cars of masses m1 and m2, and three springs of spring constants k1, k2 and k3, and we want to obtain the equations of motion for the two cars. • We could use the Lagrangian formalism, but let’s use the Newtonian approach first. The equilibrium positions of the two cars are shown by the lines, and we will use coordinates x1 and x2 relative to those. • The forces on m1 are k1x1 to the left, and k2(x2 -x1) to the right, so its equation of motion is Likewise:
Two Masses and Three Springs-2 • The two coupled equations of motion: can be written more compactly using matrix notation, as where • Notice that this is a generalization of the single oscillator, which you can see by setting k2 and k3 = 0. You then get a single equation as in Chapter 5. Note also that if the coupling spring, k2 = 0, then the two equations become uncoupled and describe two separate oscillators. • As we did in Chapter 5, we will find complex solutions z(t) = aeiwt, but you can imagine that we might have more than one frequency of oscillation, since we have two ms and 3 ks. It turns out that we only need to assume one frequency initially, but we will arrive at an equation for w that is satisfied by more than one frequency. • Let’s try the solutions:
Two Masses and Three Springs-3 • Recall that when we write the solution in terms of complex exponentials, we will ultimately have to keep only the real part of the solution, i.e. x(t) = Re z(t). • When we substitute z(t) into we find the relation so the following equation must be satisfied: • Clearly, if we ignore the trivial solution a = 0 (no motion at all), we must have This is a generalization of the eigenvalue problem that was introduced in Chapter 10. • Since these are two x two matrices, you can see that the determinant will give a quadratic equation for w2, with two solutions (two roots). • This implies that there are two frequencies at which our system will oscillate, and these are called normal modes of the system. We could find them for this system with two different masses and three different spring constants, but it is complicated and not very interesting. Let’s look at simpler systems.
11.2 Identical Springs and Equal Masses • For this case, the matrices M and K become: • We then need to find the determinant of which is • Setting this to zero, we find two solutions (the two normal mode frequencies): • Now that we have the frequencies, we must still solve the equation • We do this twice, once for each frequency, to obtain the motion x(t) for the two oscillating carts.
First Normal Mode • First insert , so that the relation • As a check, you can see that the determinant of this matrix is zero. The solutions are then • These are both the same equation, and simply says that a1 = a2 = Ae-id. Since we finally have • That is, both carts move in unison:
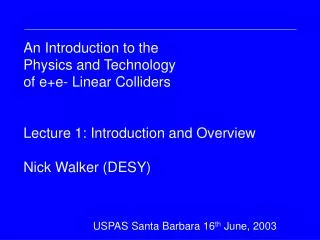
First Normal Mode-2 • The motion is shown in the figure below. Notice that the spring between the two carts does not stretch or contract at all. • When we plot the motion, it looks like this (identical motions, in phase).
Second Normal Mode • Now insert , so that the relation • As a check, you can see that the determinant of this matrix is zero. The solutions are then • These are again both the same equation, and simply says that a1 = -a2 = Ae-id. Since we finally have • That is, both carts move oppositely:
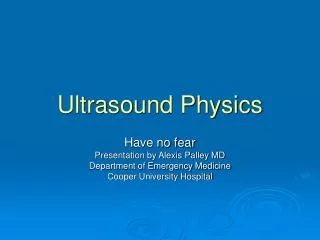
Second Normal Mode-2 • The motion is shown in the figure below. Notice that the spring between the two carts stretches and contracts, contributing to the higher force, and hence, higher frequency. • When we plot the motion, it looks like this (identical motions, in phase, but at a higher frequency w2).
General Motion • It is important to realize that, although these are the only two normal modes for the oscillation, the general oscillation is a combination of these two modes, with possibly different amplitudes and phases depending on initial conditions. • The resulting motion is surprisingly complicated, but deterministic. Because is an irrational ratio, the motion never repeats itself, except in the case that either A1 or A2 = 0. Motion for A1 = 1, d1 = 0 A2 = 0.7, d2 = p/2
Normal Coordinates • If the motion seems complicated, you should realize that there is an underlying simplicity that is masked by our choice of coordinates. We can just as easily choose for our coordinates the so-called normal coordinates • Using these coordinates, as you can easily check, the two normal modes are no longer mixed, but instead we have:
11.3 Two Weakly Coupled Oscillators • Let’s consider an interesting special case of two coupled oscillators with weak coupling. We can arrange this by making the coupling spring weak compared to the figure below, with k1 = k3 = k, and k2 << k. • As you can guess, this will have the same normal modes as before, with • Solving we conclude that • The difference here is that k2 is small, so w1 w2.
Two Weakly Coupled Oscillators-2 • To take account of this closeness in the two frequencies, we will write the result in terms of the average frequency • To emphasize how close the two frequencies are to this average, we can also write Thus, e is half the difference between the two frequencies. • The two normal modes are then (i) the two cars moving in phase (with the middle spring not involved at all) and (ii) the two cars moving exactly out of phase: where the complex constants C1 and C2 are determined by initial conditions. • Writing the general solution as the superposition of these, and factoring the exponential, we have Slowly varying envelope
Envelope is cos et Rapid oscillation is cos wot Two Weakly Coupled Oscillators-3 • In general, the constants are complex constants, but let’s look at the case where they are equal and real, i.e. C1 = C2 = A/2, so the solution becomes • We take the real part of this to get • The result is the following, displaying “beat” frequencies.