Download
1 / 7
70 likes | 88 Views
This presentation explores the real stabilizability radius of the multi-link inverted pendulum, a classic problem in control theory utilized as a benchmark for testing control algorithms. Properties of the v-link inverted pendulum, linearized model, and system stabilizability for any number of links are analyzed. The discussion includes limitations in stabilizing pendulums with many links due to factors like nonlinearity, initial conditions, and physical disturbances. The concept of the real stabilizability radius as a measure of system perturbations impacting stabilizability is also addressed.

E N D
The Real Stabilizability Radius of the Multi-Link Inverted Pendulum Connections 2006 ECE Graduate Symposium Presenter: Simon Lam Supervisor: Professor E. J. Davison Systems Control Group, ECE University of Toronto Date: June 9, 2006
Introduction • classic problem in control theory • widely used as a benchmark for testing control algorithms
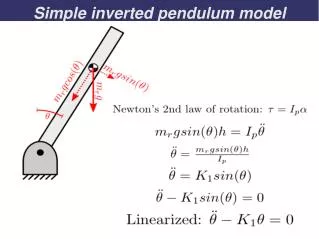
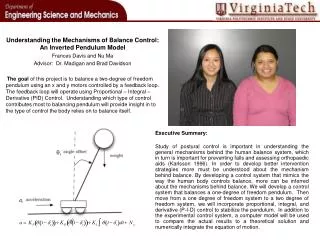
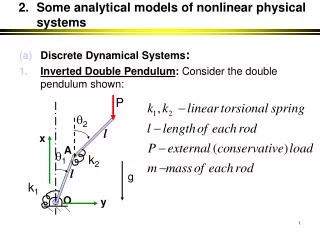
Mv θv Lv M2 θ2 L2 M1 θ1 L1 u Properties of a v-link Inverted Pendulum Linearized Model: System is stabilizable for any number of links Can design a controller to (locally) stabilize a pendulum with any number of links!
Gap • Of course, in reality, we can’t stabilize an inverted pendulum with too many links. • Possible factors? • Nonlinear effects (e.g. friction) • Initial conditions • Sensitivity to physical disturbances Conjecture: real stabilizability radius is too small
Real Stabilizability Radius • Given a stabilizable LTI system: the real stabilizability radius measures the smallest such that the perturbed system: is no longer stabilizable.