Download

1 / 13
130 likes | 147 Views
7th Online World Conference on Soft Computing in Industrial Applications. 2D Image registration with iterated local search Oscar Cordón 1 - Sergio Damas Arroyo 2 - Eric Bardinet 3 ( 1 ) Department of Computer Science and Artificial Intelligence ( 2 ) Department of Software Engineering

E N D
7th Online World Conference onSoft Computing in Industrial Applications 2D Image registration with iterated local search Oscar Cordón1 - Sergio Damas Arroyo2 - Eric Bardinet3 (1) Department of Computer Science and Artificial Intelligence (2) Department of Software Engineering University of Granada, SPAIN (3) INRIA. Epidaure Project. Sophia Antipolis, FRANCE
Contents • Introduction • Shape caracterization from the medial axis • Image registration • Iterated local search for the 2D registration problem • The iterated local search metaheuristic • The local search algorithm considered • The iterated local search components • Experiments • Concluding remarks
1. Introduction • Image registration is a fundamental task in computer vision • A new family of search and optimization algorithms has arised • In this work, we try to apply Iterated Local Search (ILS) to solve the registration problem • Our contributions are related to the fact of jointly solving matching and registration transformation problems. CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
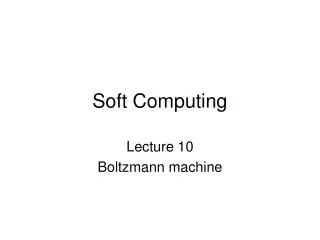
2. Shape characterization from the medial axis • The skeleton of a 2D object is formed by pieces of curves linked together by junctions. • The frontier points of the skeleton are those which end skeleton parts and are not in contact with junction points. • The topological clasification of the skeleton attaches to each of the skeleton points one of the following labels: • Type F: Frontier point • Type J: Junction point • Type C: Pure curve point CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
2. Shape characterization from the medial axis • From the previous labeled skeleton parts we are able to obtain an object partition with region significance. • A well known skeleton based object partioning method is skiz (skeleton by influence zones). • To each skeleton part and object region we can attach different attributes • Size of the skeleton part compared to the global skeleton size • Variation of the distance map along the the skeleton part • Region size relative to the object size • Variation of the curvature sign along the skeleton part • ... CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
3. Image registration • Image registration can be defined as a mapping between two images (I1 and I2) both spatially and with respect to intensity I2 (x,y,z,t) = g (I1 (f (x,y,z,t))) We can find situations where intensity difference is inherent to scene changes, and thus intensity transform given by g is not necessary. • Iterative closest point (ICP ) is a well known registration method based on finding the matching between data and model points by a closest assignment rule, computing the related registration and appling such a transformation. This process is iterated until the algorithm converges. CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3. Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
3. Image registration • ICP presents some important drawbacks: • It is very sensitive to outlier presence • The initial states for global matching play a basic role • The estimation of the initial states mentioned above is not a trivial task • The cost of a local adjustment can be important if a low percentage of oclussion is present. CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3. Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
4. Iterated local search for the 2D registration problem 4.1 The iterated local search (ILS ) metaheuristic • ILS is based on a wrapper around a specific LS algorithm by generating multiple initial solutions as follows: procedureIterated Local Search s = GenerateInitialSolution s* = LocalSearch (s) repeat s’ = Perturbation (s*, history) s* ’ = LocalSearch (s’) s* = AcceptanceCriterion(s*,s* ’, history) until termination condition met end CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
4. Iterated local search for the 2D registration problem 4.2 The local search algorithm considered • This LS procedure considered allows us to obtain a complete solution: a point matching between the data and the model shapes, and a registration transformation to move the former into the latter. • Point matching is represented as a permutation. • Common structure in the field • Different number of points in input images • Features of the shape are used to guide both the matching and the registration. The objective function will be: CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2.The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
4. Iterated local search for the 2D registration problem 4.3 The iterated local search components • GenerateInitialSolution: A random permutation is computed • Perturbation: random exchange of the positions of the values within a randomly selected sublist of size N/a • Termination condition: the algorithm stops when a number of iterations is reached CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
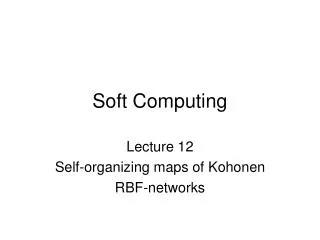
5. Experiments • Original shapes • Transformations to be searched for 1) 2) 3) 4) • ICP presents some important drawbacks: • It is very sensitive to outlier presence • The initial states for global matching play a basic role • The estimation of the initial states mentioned above is not a trivial task • The cost of a local adjustment can be important if a low percentage of oclussion is present. • Iterative closest point (ICP ) is a well known registration method based on finding the matching between data and model points by a closest assignment rule, computing the related registration and appling such a transformation. This process is iterated until the algorithm converges. CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
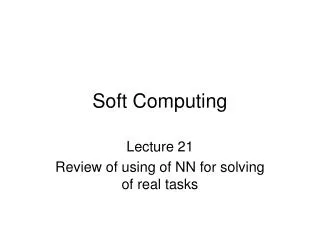
5. Experiments • Matching and registration (overlaping) ILS results: CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6.Concluding remarks
6. Concluding remarks • Image registration has been formulated as a two fold problem (matching + similarity transformation parameters) • We have taken advantage of the information infered from the medial axis of the object • We have used ILS metaheuristic to face such a complex optimization problem • We have presented results with important transformations applied to different model shapes CONTENTS 1.Introduction 2.Shape characterization from the medial axis 3.Image registration 4.Iterated local search for the 2D registration problem 4.1.ILS metaheuristic4.2. The LS algorithm considered 4.3.ILS components 5. Experiments 6. Concluding remarks