Download
1 / 15
150 likes | 163 Views
The Robot-Cub project aims to develop cognitive manipulation skills with the iCub humanoid robot, creating an open system for scientific community collaboration. The iCub robot is a small humanoid with 53 degrees of freedom and various sensors for perception and action. The project's timeframe includes completing the prototype by September 2007 and building more platforms for scientific community use by March 2008. Seeking international collaboration and contributing to cognition-based projects are key goals. Join and innovate with the Robot-Cub project today!

E N D
the RobotCub project Giulio Sandini (1,2) , Giorgio Metta (1,2) , David Vernon (1) (1)University of Genoa (2) Italian Institute of Technology
Main Figures • RobotCub is a 5 years project funded by the European Commission in the field of “cognitive systems” (cordis.europa.eu/cognition) • Presently the consortium is composed of 16 Partners, 11 from Europe, 3 from Japan and 2 from the USA. • The consortium is coordinated by University of Genoa • Total Funding is 8.5 M€ and total effort is 1,651 person-months (138 person-years) The project started in September 2004
Robot-Cub scientific goal is to study the development of cognitive manipulation skills (manipulation, imitation, gesture communication) RobotCub Robot-Cub engineering goal is to build a humanoid platform to be used by the scientific community as a common platform the iCub
Research Strategy Global scientific community is best served by creating an open platform and exploiting synergies An Open System!! Robot-Cub engineering goal is to build a humanoid platform whose design is open to the scientific community and can be duplicated and improved by the community of its users.
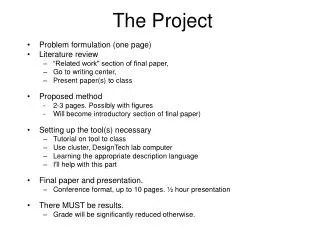
The iCub The iCub is the humanoid baby-robot being designed within the RobotCub project • The iCub will be a full humanoid robot sized as a two and half year-old child. • The total height is estimated to be around 94cm. • It will have 53 degrees of freedom, including articulated hands to be used for manipulation and gesturing. • The robot will be able to crawl and sit and autonomously transition from crawling to sitting and vice-versa. • The robot is GPL/FDL: software, hardware, drawings, documentation, etc.
Size, shape, dof’s 243mm From human data 369mm From our experiencewith other platforms Approx 934mm 439mm Avg. 14kg - 30.8 lb Not quite! 23kg
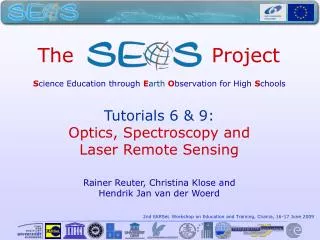
Hand and finger Internal wires Angle sensors Tactile Tension sensor
Sensors… 640x480 color Remote head Very small but otherwise standard • Cameras • Skin/tactile • Gyros/inertial • Microphones Small (0.67mm) Designing force/torque sensor Fingertip 3-axis sensor Joint torque measurement Conductive paint… QTC: rubber-like material Tension sensors?Organic FETs? Standard, condenser electret
More sensors… • Tension Sensors • Fingertips
Foot (note the size) Hips Being assembled… Upper torso + head + shoulder & elbow Control cards Head Force/torque sensor
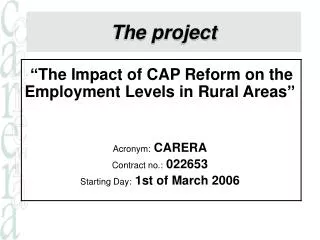
Cognitive Architecture Based on phylogenic configuration Level 1 APIs: perception/action behaviors own learning model Innate perception/action primitives loose federation of behaviors Level 2 APIs: Prospective Action Behaviors Coordinated operation: Ontogenic Development Level 0 APIs: data acquisition & motor control Software Architecture Multiple YARP processes Running on multiple processors Gbit Ethernet pc104 HUB iCub Embedded Systems DSP DSP DSP DSP Sensors & Actuators
Timeframe • Sept 2007: • First Prototype completed, tested and debugged • Sept 2007: • Launch of Competitive Calls • March 2008: • 8 more platforms built for the scientific community • Additional projects start
Seeking International Collaboration • Joining effort with on-going project (and contribute to new proposals) • Directly support projects on “Cognition” based on iCub platform