Download
1 / 40
410 likes | 579 Views
Rotatie bidimensionala. Rotatie tridimensionala. Forma indiciala a rotatiei. 9 parametrii. ce descriu rotatia 3D. Rotatia nu poate modifica lungimea unui vector. constrangerea pentru miscarea solidului rigid va fi. folosind transformarea matriciala. 9-6=3GL. matricea.

E N D
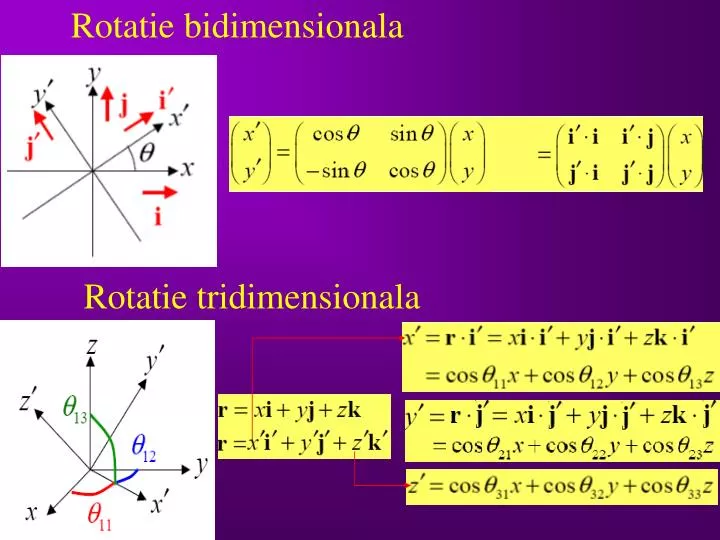
Rotatie bidimensionala Rotatie tridimensionala
Forma indiciala a rotatiei 9 parametrii ce descriu rotatia 3D Rotatia nu poate modifica lungimea unui vector • constrangerea pentru miscarea solidului rigid va fi • folosind transformarea matriciala 9-6=3GL • matricea este ortogonala Transpusa
matrice proprie Spatiul inversiunii este matrice improprie • este ortogonal si nu modifica distantele • nu poate fi o rotatie Rotatia solidului rigid este reprezentata de matrici ortogonala proprii !
Cum se interpreteaza actiunea matricii A pe r ( ) ? - rotim r in jurul unei axe cu un anumit unghi in directia acelor de ceasornic (+) - rotim axele de coordonate in jurul aceleiasi axe cu acelasi unghi, dar in directie opus (unghiul +=in sens invers acelor de ceasornic) Rotatie cu un unghi in jurul axei Oz in sens invers acelor de ceasornic Rotatie cu un unghi in jurul axei in sens invers acelor de ceasornic
Rotatie cu un unghi in jurul axei in sens invers acelor de ceasornic
Miscarea solidului rigid se studiaza facand urmatorii pasi: Se definesc axele (axele solidului) atasate solidului rigid - Originea fixata intr-un punct al solidului rigid - Axele avand la t=0 aceeasi directie cu axele spatiale Folosim R(t) pentru a descrie miscarea originii Folosim A(t) pentru a descrie rotatia axelor - Utilizam unghiurile Euler - Observam ca avem 6 coordonate independente Teorema lui Euler In general, deplasare unui solid rigid in raport cu un punct fixat este o rotatie in raport cu o axa
- o rotatie 3D arbitrara este echivalenta cu o rotatie in jurul un ei axe - orice rotatie 3D lasa un vector neschimbat - pentru orice matrice de rotatie A exista un vecror r care satisface - matricea A are valoarea proprie egala cu 1 Dem deoarece ( si deoarece pentru matrici impare ) Q.E.D Exista posibilitatea introducerii unui vector de rotatie ? Teorema lui Euler evidentiaza un alt mod de a descrie rotatia 3D:
directia axelor (2 parametrii) si unghiul de rotatie (1 parametru) • pare similar cu momentul unghiular ! Diferenta de baza consta in : Comutativitate Momentul unghiular este un vector - nu conteaza ordinea adunarii a doua momente unghiulare Rotaia nu este un vector - doua rotatii se aduna diferit , rezultatul depinzand de ordinea lor • ele pot fi reprezentate prin vectori • sunt importante pentru a descrie modul • in care un solid rigid isi schimba orientarea • in timp Rotatiile infinitezimale sunt comutative doua rotatii infinitezimale succesive conduc la In general comutativa
Inversa rotatiei infinitezimale este: antisimetric Deoarece Definim acum rotatia infinitezimala a unui vector Conform teoremei lui Euler rotatia infinitezimala a unui vector este echivalenta cu rotatia de unghi dФ in jurul unei axe n unde se comporta aproape ca un vector
se roteste in acelasi fel ca si r in raport cu coordonatele rotatieie In spatiul inversiunilor S un vector ordinar se incerseaza dupa legea: iar nu Un astfel de vector este numit vector axial (momentul unghiular, c.magnetic)
Care este legatura dintre acceleratia unghiulara si unghiurile Euler? Consideram un corp solid in rotatie Definim coordonatele corpului solid Intre momentele t si t+dt, coordonatele CS se rotesc cu • rotatia are loc in sens invers acelor • de ceasornic • observam ca in spatiul coordonatelor, • orice punct r al rigidului se va misca • dupa legea: Pentru un vector oarecare V deoarece
Spatiul coordonatelor Coordonatele rotatiei Incercam sa utilizam viteza unghiulara pentru a descrie rotatia rigidului! Rotatii infinitezimale
In sistemul Stim deja sa exprimam vitezele in termenii derivatelor temporale ale unghiurilor Euler! Care este forma Lagrangianului ? Energia cinetica a unui sistem multi-particula este: Miscarea CM Miscarea in jurul CM Definind axele solidului din CM
Componenta translationala Componenta rotationala Aceasta separare este valabila cand CM este originea sistemului axelor solidului Consideram momentul unghiular total: Pe componente: Tensorul de inertie I
Utilizand formalismul indicial Iar componentele matricii au forma Pentru cazul unei distributii continue de masa: Cum exprimam energia cinetica in functie de momentul unghiular total ? Energia cinetica datorata rotatiei are forma:
Tinand cont de versorul directiei vitezei unghiulare este momentul de inertie in raport cu axa n unde Obs. - n se misca in timp - I=I(t) este bine sa separam miscarea de translatie de cea de rotatie Daca originea axelor corpului solid nu se gaseste in CM de la origine de la CM I in raport cu CM I al CM
Ce am reusit sa demonstram ? - Viteza datorata rotatiei - Conexiunea dintre ω si unghiurile Euler - Forma Lagrangianului cu cumponentele sale : translatie/rotatie - Definirea tensorului de inertie - calculu momentului cinetic si al energiei cinetiece Cu ajutorul tensorului de rotatie R, tensorul de inertie poate fi diagonalizat
Proprietatile cinematice ale unui solid rigid sunt complet descrise dac se cunosc: masa, axele principale si momentele de inertie Ce sunt axele principale ? - Fie un corp solid a carui axe sunt • tensorul de inertie I (in general) nu este diagonal • el poate fi diagonalizat prin - Rotind cu R noi axe de coordonate in care Putem alege un set de axe ale solidului care sa diago- nalizeze tensorul de inertie Axele principale Cum facem aceasta alegere ?
-consideram versorii axelor principale Vector propriu Valoare proprie - exprimam I in orice sistem de coordonate al solidului - rezolvam ecuatia cu valori proprii - vectorii proprii indica axele principale - utilizam aceste axe pentru a redefini coordonatele solidului si a simplifica I Ecuatia miscarii de rotatie ! - ecuatia newtoniana a mis carii da Axele “solidului” Axele “spatiale”
- Luam axele principale ale solidului Ecuatia Euler de miscare a solidului in raprt cu un punct fix Cazuri speciale
Momente de inertie in raport cu axele de coordonate Tensor simetric Pentru distributii continue de masa EXEMPLE Determinati componentele Iij ale tensorului de inertie {Iij} pentru un cub de densitate uniforma, de latura b si masa M, avand unul din colturi plasat in origine b M
deoarece datorita simetriei
Axe principale de inertie Determinarea formei diagonale a{Iij}este echivalenta cu gasirea unui nou sistem de trei axe de coordonate pentru care energia cinetica de rotatie si momentul unghiular sunte date de: Aceste axe se numescaxe principale de inertie ! Avand dat un sistem de referinta inertial in solid, putem trece la axele principale printr-o transformare ortogonala =transformare pt. axe principale
Existenta solutiilor netriviale implica anularea determinantului: Ecuatie seculara sau ecuatie caracteristica ( In aplicatii, momentele principale de inertie, fiind valori proprii ale lui I, sunt solutiile ecuatiei seculare)
EXEMPLU Determinati principalele axe de inertie pentru cubul din exemplul anterior Facem urmatoarea notatie Valori proprii Matricea care diagonalizeaza{Iij) va fi
Matricea diagonalizata a lui Teorema axelor paralele Sistem care are originea in CM al corpului rigid Sistem cu originea intr-un punct diferit (dar axe paralele)
Componentele tens. Inertie in noul sistem Coord. CM Tensorul de inertie pentru CM= teorema axelor paralele EXEMPLU Pentru cubul anterior
Proiectam ecuatia pe principalele axe de inertie Deoarece axele principale de inertie sunt independente de timp Ecuatiile Euler EXEMPLU Demonstrati ca dupa lovirea orizontala cu un tac, o bila de biliard va aluneca fara rotatie pe distanta = viteza initiala dupa care va incepe sa se roteasca, fara sa alunece, un timp
Cand forta impulsiva a incetat, conditiile initiale sunt: Forta de frecare este: Ecuatia de miscare va fi: Ecuatia momentului cinetic: Integrand cele doua ecuatii:
Tinand cont de conditiile initiale: Conditia de rostogolire pura (fara frecare): Integram Titirezul Orice solid in miscare de revolutie este un titirez simetric.
Axa de simetrie este Ecuatiile Euler proiectate pe principalele axe de inertie Inexistenta cuplurilor de torsiune (+) notam
indep. de timp Acest vector efectueaza o miscare de precesie cu o frecventa de precesie =const. Notand cu unghiul dintre si Pentru miscarea de revolutia unui corp turtit cazul Pamantului zile - Pamantul nu este un corp rigid - Structure sa interna estenfluida