Download
1 / 24
240 likes | 425 Views
Unit 4 The Performance of Second Order System. 中華技術學院電子系 副教授 蔡樸生 副教授 林盈灝. Open Loop & Close Loop. Open Loop :. Close Loop :. The Performance of Second Order System. The Response of Second Order System. Homework 1. 1. Steady State Error :. 2. Overshoot :. 0.163.

E N D
Unit 4 The Performance of Second Order System 中華技術學院電子系 副教授 蔡樸生 副教授 林盈灝
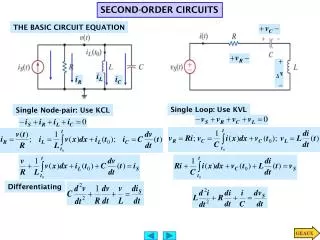
Open Loop & Close Loop Open Loop: Close Loop:
Homework 1 1. Steady State Error : 2. Overshoot : 0.163 3. The Peak Time : 1.8138 s 4. The Rise Time : 0.9 s 5. The Setting Time : 4 s [Hint] : max
P Controller • This type of control action is formally known as proportional control (Gain) • Homework3 : K=1, K=4 , K=8 , K=12 , K=36 • Please explain the effect of P controller to the second order system
The Performance of P Controller • : The error signal is positive, the torque is positive and rising rapidly. The large overshoot and oscillations in the output because lack of damping. • : The error signal is negative, the torque is negative and slow down causes the direction of the output to reverse and undershoot. • : The torque is again positive, thus tending to reduce the undershoot, the error amplitude is reduced with each oscillations.
The contributing factors to the high overshoot • The positive correcting torque in the interval is too large (抑制) Decrease the amount of positive torque • The retarding torque in the interval is inadequate (增強) Increase the retarding torque
The Effect of PD Controller • : is negative; this will reduce the original torque due to alone. • : both and is negative; the negative retarding torque will be greater than that with only P controller. • : and have opposite signs. Thus the negative torque that originally contributes to the undershoot is reduced also.
Solution of PD Controller • clear; • x1=0;x2=0;dt=0.01;r=1;step=2000; • kp=36;kd=6;pe=r-x1; • for k=1:step • t(k)=k*dt; • e=r-x1; • de=(e-pe)/dt; • u=kp*e+kd*de; • x1=x2*dt+x1; • x2=(u-4*x2)*dt+x2; • pos(k)=x1;vel(k)=x2;pe=e; • end
HW5 : The Effect of PI Controller • Adds a zero at to the forward-path T.F. • Adds a pole at to the forward-path T.F. • This means that the steady-state error of the original system is improved by one order. a=2,b=8,k=1
Program of PID Controller • clear; • x1=0;x2=0;dt=0.01;r=1;step=2000; • kp=1;kd=6;ki=0.1;pe=r-x1;ie=(r-x1)*dt; • for k=1:step • t(k)=k*dt; • e=r-x1; • de=(e-pe)/dt; • ie=ie+e*dt; • u=kp*e+kd*de+ki*ie; • x1=x2*dt+x1; • x2=(u-2*x2-8*x1)*dt+x2; • pos(k)=x1;vel(k)=x2;pe=e; • end
Homework6針對以下系統, 憑藉經驗值調諧PID三個參數值, 使得系統響應為最佳化
Homework7 : Ziegler-Nichols Tuning Step 1 : Let until the occur of critical stable Step 2 : Optimal Parameter Tuning
Feedback Controller Design State Feedback Controller