Download
1 / 22
220 likes | 310 Views
System to Remotely Transport and Deploy an Unmanned Helicopter. MEM Senior Design Team Number 10. Dr. Paul Y. Oh (Advisor) Jason Collins (MEM) Michael Perreca (ECE) Caitlyn Worthington-Kirsch (MEM) Drexel Autonomous Systems Laboratory (D.A.S.L.) March 5, 2008. Overview.

E N D
System to Remotely Transport and Deploy an Unmanned Helicopter MEM Senior Design Team Number 10 Dr. Paul Y. Oh (Advisor) Jason Collins (MEM) Michael Perreca (ECE) Caitlyn Worthington-Kirsch (MEM) Drexel Autonomous Systems Laboratory (D.A.S.L.) March 5, 2008
Overview -Hazardous site rescue effort -UAV provide observational platform during “Golden Hour” -Not interfere with existing rescue efforts -Rapid unmanned transport and deployment -Adapt to dynamic situation -Current mission plan gap: Unmanned transport and deployment of UAV systems Goal: Design trailer to carry UAV to scene http://newsimg.bbc.co.uk/media/images/44194000/jpg/_44194534_afp203bodybonita.jpg http://www.viewimages.com/Search.aspx?mid=51919023&epmid=1&partner=Google
Thresholds and Objectives
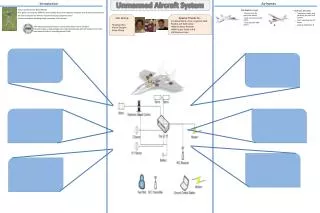
System Overview Enclosure framework Suspension Trailer Leveling gimbal
Deliverables • Leveling system • -Data Acquisition and Actuation Electronics -Suspension system -Enclosed Trailer -Testing Results -Final Design Report
Leveling System Proposed Solution -Gimbal system to level platform -Breaks to dampen oscillation -Bump stops to prevent over travel
Leveling System Progress Gimbal is constructed and able to safely support helicopter 7
Braking Setback Original gimbal brakes too expensive and overdesigned We solved this by using caliper brakes adapted from a bicycle 8
Latch Design The design for the latch to hold the helicopter on the gimbal during transit had been discussed in the fall term but not refined This term the design was refined and the latch built 9
Dampening System Design Initial design: a classic spring-dashpot system Only moves along one axis Bowls made the ball design stable and adaptable A compressible sphere moves on all axes and is simple, but still unstable Allowing sideways movement - unstable Multiple systems for different axes – too complex
Dampening System Proposed Solution Compressible ball between two bowls Allows for sideways and twisting movement Transference of approximately 5% of vibration at 5 Hz Tunable for varying conditions by inflating and deflating ball Proof-of-concept Cad model
Dampening System Progress Dampening System built and installed Initial qualitative tests were successful 12
Overall Mechanical Progress Trailer is almost ready for testing Still need to finish the enclosure 13
Data Acquisition andActuation Electronics National Instruments Compact RIO NI Compact RIO • NI 9476- 32 Channel Voltage Sourcing Output • 250mA supply/channel • 6-36V output range • NI 9205 • 32 Analog Input Channels • ±200mV - ± 10V Input Ranges • 16-bit resolution; 250 kS/s aggregate sampling rate
Data Acquisition andActuation ElectronicsActuation Wiring • 2 SPDT Bosch-Style 30 Amp Relays • Wired in an H-Bridge configuration • Allows for positive and negative direction actuation • Low current needed to trigger relays
Data Acquisition andActuation ElectronicsActuation Wiring • 12 V to 6V DC-DC converter wired • Compact RIO mounted and wired • Motors and relays wired and mounted for latch and brakes • Sensors for brakes and latch wired
Data Acquisition andActuation ElectronicsCompact RIO Programming • Individual latch status reporting • Push button actuation • Sensor response values visible for brake adjustments • Future Plans: • Damped braking setting for in-transit protection • Programming for enclosure actuation
Timeline Mar 25 – Enclosure completed Mar 29 – Actuation electronics completed Mar 31 – Full trailer testing begins May 5 – Final report and end of project
Budget Total project expenses, including salaries: $105,000 Total approved budget: $8128.55 Expenditures to Date: 8020 stock $1,463.71 8020 fasteners $932.28 other hardware $1,031.74 actuators $614.46 Electrical $848.72 NI $282.54 trailer $820 total $5,993.45 Anticipated future spending: $1000
Acknowledgements Dr. Paul Y. Oh D.A.S.L. Members MEM Senior Design Committee ECE Senior Design Committee All Those in Attendance
Thank You Questions? ?