Download
1 / 43
430 likes | 690 Views
12-1. 12-2. 12-3. 12-4. 12-5. 12-1. 12-1. 雖然在第十章已有示範幾個交流電動機的控制範例,但在可程式控制器的控制範疇上乃顯得不足,故在本章節增添工業界上常用的直流馬達、步進馬達、七段顯示器、指撥開關、近接開關 (Sensor) 及蜂鳴器綜合應用,期望藉由簡易控制範例增強讀者對於 FX2/FX2N 可程式控制器應用使用上的能力。. 12-1 PLC 搭配 VEXTA 驅動器的步進馬達控制. 12-1. 12-1. 圖 12-1. 12-1. 12-1. 圖 12-2 PLC D/I 接線. 12-1.

E N D
12-1 12-2 12-3 12-4 12-5
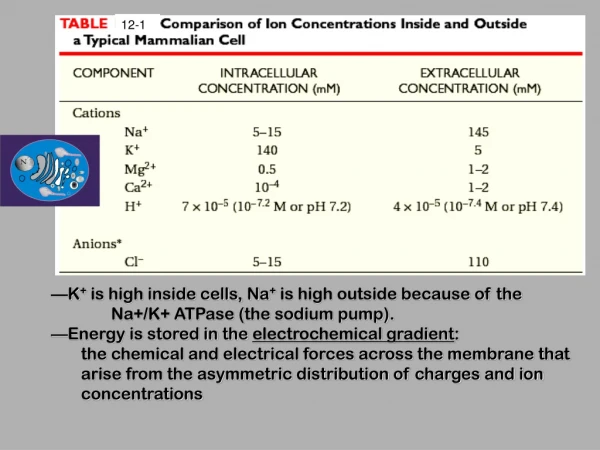
12-1 12-1 雖然在第十章已有示範幾個交流電動機的控制範例,但在可程式控制器的控制範疇上乃顯得不足,故在本章節增添工業界上常用的直流馬達、步進馬達、七段顯示器、指撥開關、近接開關(Sensor)及蜂鳴器綜合應用,期望藉由簡易控制範例增強讀者對於FX2/FX2N可程式控制器應用使用上的能力。
12-1 圖12-1
12-1 圖12-2PLC D/I 接線
12-1 圖12-3PLC D/O與驅動器接線
動作說明 1.假設工作台位置在左極限,設定位移量的脈波數為D2 (20000 Pulse),當SW1(X001)ON及PB1(X000)按下。執行平台由左邊往右移動。輸出脈波頻率在T1(1秒)時間內由A(500Hz)提升到B(10000Hz),然後在B-C段保持等速。當輸出脈波量達到欲減速位置時,輸出脈波頻率在T2(1秒)時間內由C(10000Hz)降低到D(500Hz),直到馬達右移到預定位之位置後停止。 12-1 圖12-4
2.當SW1(X001)OFF及PB1(X000)按下執行平台由右邊往左移動。輸出脈波頻率在T1(1秒)時間內由A(500Hz)提升到B(10000Hz),然後在BC段保持等速。當輸出脈波量達到欲減速位置時,輸出脈波頻率在T2(1秒)時間內由C(10000Hz)降低到D(500Hz),直到馬達左移到預定位之位置後停止。2.當SW1(X001)OFF及PB1(X000)按下執行平台由右邊往左移動。輸出脈波頻率在T1(1秒)時間內由A(500Hz)提升到B(10000Hz),然後在BC段保持等速。當輸出脈波量達到欲減速位置時,輸出脈波頻率在T2(1秒)時間內由C(10000Hz)降低到D(500Hz),直到馬達左移到預定位之位置後停止。 3.當馬達右移到右極限(X002),或左移到作極限(X003)時,脈波輸出(Y000)應立即停止,並將馬達左移(Y002)或右移(Y001)的控制輸出點OFF。 4.當BP2(X004)按下,運轉中馬達應即時停止。 12-1
程式說明: 1.脈波輸出[PLSY]指令說明 12-1 (1)指令意義:產生所指定的的頻率及數量的脈波指令。 :指定頻率2~20,000(Hz)。其內容可於命令已動作中作變更。 :指定脈波產生量,16位元時1~32,767,32位元時為2,147,483,647。當指定為0時,則無限制產生脈波。其內容不可於命令已動作中作變更。 :指定脈波輸出點〈Y000或Y001〉。請選用電晶體輸出PLC。
(2)輸出脈波數儲存在D8136(下位),D8137(上位)。 (3)當X001是OFF時,輸出會發生中斷。若再度ON時,會從最初動作開始執行,當連續脈波產生時,X001為OFF時則Y000為OFF。 2.傾斜信號[RAMP]指令說明 (1)指令意義:先將初期值和目標值分別寫入D10,D12內,在X000為ON時,D0的值會由D10數值開始經所設定的n次掃描時間(K1000表示1000*1ms)變為D12數值。 12-1
(2)移動結束後,旗標M8029為ON,D0的值會被復歸為D10的數值。 (2)移動結束後,旗標M8029為ON,D0的值會被復歸為D10的數值。 (3)依模式旗標M8026的ON/OFF,D0的內容值如下圖所示: 3.階梯圖說明 (1)STEP 0~38:指定總行程20000Pulse到D2,起始頻率500Hz到D10,最高頻率10000Hz到D12,並將記錄運轉中Pulse數的D8136跟D8137初始化。 (2)STEP 39:計算現行位置(D8136)與目的位置(D2)的路程差,並將剩餘脈波數結果存到D4。 12-1 圖12-5
(3)STEP 53:當D4開始小於欲減速的位置(目的位置的前9500Pulse處)時,M2設為ON。 (4)STEP 67~90:M2是ON時的瞬間,清除現行頻率D0,並將D10與D12的資料交換。 (5)STEP 91:M1為ON時,D0於1秒的時間內,由D10遞增或遞減至D12,然後保持加工的脈波頻率輸出至Y0。 (6)STEP102:以D0值的頻率送出Pulse數至Y000的輸出點,直到D8136,D8137的內容值等於D2,D3。 (7)STEP119:X001 ON,X002 OFF,Y001(右移)輸出。 (8)STEP122:X001 OFF,X003 OFF,Y002(左移)輸出。 12-1
PLSR指令實現步進馬達控制程式設計 由於上列12-1的範例是採用PLSY應用指令的非對稱式控制方式,本節將採用PLSR應用指令的對稱梯形速度控制曲線去實現步進馬達的定位控制,如此可以大幅降低程式設計的困難度,其程式和說明如下: 12-1
程式說明: 1.附加減速的脈波輸出[PLSR]指令說明: 12-1 圖12-6
(1)指令意義:具有加減速機能脈波指令。 ① :設定最高頻率數(Hz) 可設定範圍:10~20000(Hz),頻率為指定的10倍數,指定個位數時請刪除。最高頻率指定1/10為可減速時的一次變速量(Hz)。 ② :總輸出脈波數(Pulse) 可設定範圍: 16位元演算時,為110~32767(Pulse)。 32位元演算時,為110~2147483647(Pulse)。 未滿110的設定值時,脈波輸出不正常。 ③:加減速時間(ms) 可設定範圍:5000ms以下,但請遵守下列 ~ 條件。 12-1
加速時間:請在PLC掃描間的最大值(D8012的值以上)10倍以上,若未滿10倍以上時,加減速時序不會穩定。加速時間:請在PLC掃描間的最大值(D8012的值以上)10倍以上,若未滿10倍以上時,加減速時序不會穩定。 • 加減速可設的最小值,如下所示: • 設定在上式以上時,加減速時間的誤差會變大,未滿9000/S1的設定值時,以9000/S1來運轉。 • 加減速時間可設定的最大的設定值,如下所示。 • ③ :指定脈波輸出點〈Y000或Y001〉,請選用電晶體輸出之 PLC。 12-1
(2)此命令輸出頻率為2~20000Hz,最高速和加減速的變速速度超過此範圍時,會自動的加或減到此範圍。 (2)此命令輸出頻率為2~20000Hz,最高速和加減速的變速速度超過此範圍時,會自動的加或減到此範圍。 (3)當X001設定OFF時,輸出會發生中斷,須再度ON之後,再重新開始。 (4)命令動作中,運算元變更時,不會馬上反應在運轉上。所以變更內容時,要在下一次的命令驅動時才生效。 (5)Y000或Y001輸出脈波數會儲存在下列特殊暫存器裡: Y000的輸出脈波數:D8140(下位)、D8141(上位)。 Y001的輸出脈波數:D8142(下位)、D8143(上位)。 Y000、Y001合計的總輸出脈波數:D8136(下位)、D8137(上位)。 12-1
2.階梯圖程式說明: (1)STEP 0~15:指定總行程20000Pulse到D0,並將記錄運轉中脈波數的D8140跟D8141初始化。 (2)STEP 16:設定最高頻率為10000Hz,總輸出脈波數為D0,加減速時間為1000ms,輸出脈波為Y000。 (3)STEP32:X001 ON,X002 OFF,Y001(右移)輸出。 (4)STEP35:X001 OFF,X003 OFF,Y002(左移)輸出。 12-1
12-2 12-2 利用時間脈波(M8011)控制步進馬達 步進馬達的控制流程為(1)脈波產生器,(2)微電腦控制器,(3)驅動放大器,(4)步進馬達,(5)負載。在上一個例題中,(2)(3) 的部分由VEXTA的驅動器負責,而在這一個範例裡,我們將透過四個電晶體輸出點( Y000 ~Y003)來達到步進馬達的單相激磁控制,而電子驅動放大器電路的部分,在此將不另行介紹。 使用器材 12-2
12-2 圖12-7 圖12-8
可程式控制器I/O定義 12-2 硬體接線
動作說明 1.利用PLC內部之時間暫存器M8011 (100Hz)產生之脈波,透過電晶體輸出接點(Y000~Y003),以1相位激磁 (參考圖12-6) 的方式來驅動步進馬達。 2.當X000為ON時,馬達開始轉動,且X001為ON時,馬達正轉,而X001是OFF時,馬達則反轉。當X000是OFF時,馬達則停止轉動。 3.因為馬達本身有慣性作用,為考量馬達之使用壽命,當馬達進行正反轉切換(X002)時,必須有0.5秒的停滯時間。 4.利用M8011之上緣及下緣觸發特性,當X002為ON時,馬達是以全速運轉;當X002是OFF時,馬達是以半速運轉。 12-2
程式設計 12-2
12-3 12-3 七段顯示器與直流馬達控制 使用器材 12-3
模組示意圖 12-3 圖12-9 直流馬達模組示意圖 由圖12-8可知,當馬達逆時針旋轉一圈時,近接開關將會輸出4個數位訊號,意即當馬達旋轉90度時,會產生一個數位信號。
可程式控制器I/O定義 12-3
動作說明 1.當按一下PB1(X000)時,馬達開始逆時針轉動,此時,若再按一下PB1(X000)時,馬達立即停止轉動。 2.透過近接開關(X001),將馬達旋轉圈數顯示在七段顯示器上。(4個訊號表示一圈) 3.當PB2(X002)按下時,七段顯示器上的數值全為零。 12-3
程式設計 12-3
12-4 12-4 指撥開關與馬達控制 使用器材 12-4
指撥開關示意圖 12-4 圖12-10 單一指撥開關之輸出範圍為0~9。
可程式控制器I/O定義 12-4
硬體接線 12-4
12-5 12-5 七段顯示器、指撥開關與步進馬達控制 使用器材 12-5
可程式控制器I/O定義 12-5
硬體接線 12-5
動作說明 1.設定好指撥開關數值以表示馬達欲旋轉的圈數,01表示旋轉1圈後停止,02表示旋轉2圈後停止,以此類推至99圈。 2.當按下PB1 (X010)時,步進馬達開始轉動(以兩相位激磁旋轉),並將即時的馬達旋轉圈數顯示在七段顯示器上,直到馬達旋轉至指撥開關設定的圈數後停止。 3.當步進馬達在運行中,再按下PB1時,馬達立即停止,但七段顯示器不歸零。當再次按下PB1時,步進馬達繼續旋轉,七段顯示器繼續累計顯示。 4.當任何時候按下PB2 (X011)時,馬達立即停止轉動,再按下PB1時,馬達開始運轉,七段顯示器由零開始計數。 12-5